5.4. Firmware Design
Trusted Firmware-A (TF-A) implements a subset of the Trusted Board Boot Requirements (TBBR) Platform Design Document (PDD) for Arm reference platforms.
The TBB sequence starts when the platform is powered on and runs up to the stage where it hands-off control to firmware running in the normal world in DRAM. This is the cold boot path.
TF-A also implements the PSCI as a runtime service. PSCI is the interface from normal world software to firmware implementing power management use-cases (for example, secondary CPU boot, hotplug and idle). Normal world software can access TF-A runtime services via the Arm SMC (Secure Monitor Call) instruction. The SMC instruction must be used as mandated by the SMC Calling Convention (SMCCC).
TF-A implements a framework for configuring and managing interrupts generated in either security state. The details of the interrupt management framework and its design can be found in Interrupt Management Framework.
TF-A also implements a library for setting up and managing the translation tables. The details of this library can be found in Translation (XLAT) Tables Library.
TF-A can be built to support either AArch64 or AArch32 execution state.
Note
The descriptions in this chapter are for the Arm TrustZone architecture. For changes to the firmware design for the Arm Confidential Compute Architecture (Arm CCA) please refer to the chapter Realm Management Extension (RME).
5.4.1. Cold boot
The cold boot path starts when the platform is physically turned on. If
COLD_BOOT_SINGLE_CPU=0, one of the CPUs released from reset is chosen as the
primary CPU, and the remaining CPUs are considered secondary CPUs. The primary
CPU is chosen through platform-specific means. The cold boot path is mainly
executed by the primary CPU, other than essential CPU initialization executed by
all CPUs. The secondary CPUs are kept in a safe platform-specific state until
the primary CPU has performed enough initialization to boot them.
Refer to the CPU Reset for more information on the effect of the
COLD_BOOT_SINGLE_CPU platform build option.
The cold boot path in this implementation of TF-A depends on the execution state. For AArch64, it is divided into five steps (in order of execution):
Boot Loader stage 1 (BL1) AP Trusted ROM
Boot Loader stage 2 (BL2) Trusted Boot Firmware
Boot Loader stage 3-1 (BL31) EL3 Runtime Software
Boot Loader stage 3-2 (BL32) Secure-EL1 Payload (optional)
Boot Loader stage 3-3 (BL33) Non-trusted Firmware
For AArch32, it is divided into four steps (in order of execution):
Boot Loader stage 1 (BL1) AP Trusted ROM
Boot Loader stage 2 (BL2) Trusted Boot Firmware
Boot Loader stage 3-2 (BL32) EL3 Runtime Software
Boot Loader stage 3-3 (BL33) Non-trusted Firmware
Arm development platforms (Fixed Virtual Platforms (FVPs) and Juno) implement a combination of the following types of memory regions. Each bootloader stage uses one or more of these memory regions.
Regions accessible from both non-secure and secure states. For example, non-trusted SRAM, ROM and DRAM.
Regions accessible from only the secure state. For example, trusted SRAM and ROM. The FVPs also implement the trusted DRAM which is statically configured. Additionally, the Base FVPs and Juno development platform configure the TrustZone Controller (TZC) to create a region in the DRAM which is accessible only from the secure state.
The sections below provide the following details:
dynamic configuration of Boot Loader stages
initialization and execution of the first three stages during cold boot
specification of the EL3 Runtime Software (BL31 for AArch64 and BL32 for AArch32) entrypoint requirements for use by alternative Trusted Boot Firmware in place of the provided BL1 and BL2
5.4.1.1. Dynamic Configuration during cold boot
Each of the Boot Loader stages may be dynamically configured if required by the platform. The Boot Loader stage may optionally specify a firmware configuration file and/or hardware configuration file as listed below:
FW_CONFIG - The firmware configuration file. Holds properties shared across all BLx images. An example is the “dtb-registry” node, which contains the information about the other device tree configurations (load-address, size, image_id).
HW_CONFIG - The hardware configuration file. Can be shared by all Boot Loader stages and also by the Normal World Rich OS.
TB_FW_CONFIG - Trusted Boot Firmware configuration file. Shared between BL1 and BL2.
SOC_FW_CONFIG - SoC Firmware configuration file. Used by BL31.
TOS_FW_CONFIG - Trusted OS Firmware configuration file. Used by Trusted OS (BL32).
NT_FW_CONFIG - Non Trusted Firmware configuration file. Used by Non-trusted firmware (BL33).
The Arm development platforms use the Flattened Device Tree format for the dynamic configuration files.
Each Boot Loader stage can pass up to 4 arguments via registers to the next stage. BL2 passes the list of the next images to execute to the EL3 Runtime Software (BL31 for AArch64 and BL32 for AArch32) via arg0. All the other arguments are platform defined. The Arm development platforms use the following convention:
BL1 passes the address of a meminfo_t structure to BL2 via
arg1. This structure contains the memory layout available to BL2.When dynamic configuration files are present, the firmware configuration for the next Boot Loader stage is populated in the first available argument and the generic hardware configuration is passed the next available argument. For example,
FW_CONFIG is loaded by BL1, then its address is passed in
arg0to BL2.TB_FW_CONFIG address is retrieved by BL2 from FW_CONFIG device tree.
If HW_CONFIG is loaded by BL1, then its address is passed in
arg2to BL2. Note,arg1is already used for meminfo_t.If SOC_FW_CONFIG is loaded by BL2, then its address is passed in
arg1to BL31. Note,arg0is used to pass the list of executable images.Similarly, if HW_CONFIG is loaded by BL1 or BL2, then its address is passed in
arg2to BL31.For other BL3x images, if the firmware configuration file is loaded by BL2, then its address is passed in
arg0and if HW_CONFIG is loaded then its address is passed inarg1.In case SPMC_AT_EL3 is enabled, populate the BL32 image base, size and max limit in the entry point information, since there is no platform function to retrieve these in generic code. We choose
arg2,arg3andarg4since the generic code usesarg1for stashing the SP manifest size. The SPMC setup uses these arguments to update SP manifest with actual SP’s base address and it size.In case of the Arm FVP platform, FW_CONFIG address passed in
arg1to BL31/SP_MIN, and the SOC_FW_CONFIG and HW_CONFIG details are retrieved from FW_CONFIG device tree.
5.4.1.2. BL1
This stage begins execution from the platform’s reset vector at EL3. The reset address is platform dependent but it is usually located in a Trusted ROM area. The BL1 data section is copied to trusted SRAM at runtime.
On the Arm development platforms, BL1 code starts execution from the reset
vector defined by the constant BL1_RO_BASE. The BL1 data section is copied
to the top of trusted SRAM as defined by the constant BL1_RW_BASE.
The functionality implemented by this stage is as follows.
5.4.1.2.1. Determination of boot path
Whenever a CPU is released from reset, BL1 needs to distinguish between a warm
boot and a cold boot. This is done using platform-specific mechanisms (see the
plat_get_my_entrypoint() function in the Porting Guide). In the case
of a warm boot, a CPU is expected to continue execution from a separate
entrypoint. In the case of a cold boot, the secondary CPUs are placed in a safe
platform-specific state (see the plat_secondary_cold_boot_setup() function in
the Porting Guide) while the primary CPU executes the remaining cold boot
path as described in the following sections.
This step only applies when PROGRAMMABLE_RESET_ADDRESS=0. Refer to the
CPU Reset for more information on the effect of the
PROGRAMMABLE_RESET_ADDRESS platform build option.
5.4.1.2.2. Architectural initialization
BL1 performs minimal architectural initialization as follows.
Exception vectors
BL1 sets up simple exception vectors for both synchronous and asynchronous exceptions. The default behavior upon receiving an exception is to populate a status code in the general purpose register
X0/R0and call theplat_report_exception()function (see the Porting Guide). The status code is one of:For AArch64:
0x0 : Synchronous exception from Current EL with SP_EL0 0x1 : IRQ exception from Current EL with SP_EL0 0x2 : FIQ exception from Current EL with SP_EL0 0x3 : System Error exception from Current EL with SP_EL0 0x4 : Synchronous exception from Current EL with SP_ELx 0x5 : IRQ exception from Current EL with SP_ELx 0x6 : FIQ exception from Current EL with SP_ELx 0x7 : System Error exception from Current EL with SP_ELx 0x8 : Synchronous exception from Lower EL using aarch64 0x9 : IRQ exception from Lower EL using aarch64 0xa : FIQ exception from Lower EL using aarch64 0xb : System Error exception from Lower EL using aarch64 0xc : Synchronous exception from Lower EL using aarch32 0xd : IRQ exception from Lower EL using aarch32 0xe : FIQ exception from Lower EL using aarch32 0xf : System Error exception from Lower EL using aarch32
For AArch32:
0x10 : User mode 0x11 : FIQ mode 0x12 : IRQ mode 0x13 : SVC mode 0x16 : Monitor mode 0x17 : Abort mode 0x1a : Hypervisor mode 0x1b : Undefined mode 0x1f : System mode
The
plat_report_exception()implementation on the Arm FVP port programs the Versatile Express System LED register in the following format to indicate the occurrence of an unexpected exception:SYS_LED[0] - Security state (Secure=0/Non-Secure=1) SYS_LED[2:1] - Exception Level (EL3=0x3, EL2=0x2, EL1=0x1, EL0=0x0) For AArch32 it is always 0x0 SYS_LED[7:3] - Exception Class (Sync/Async & origin). This is the value of the status code
A write to the LED register reflects in the System LEDs (S6LED0..7) in the CLCD window of the FVP.
BL1 does not expect to receive any exceptions other than the SMC exception. For the latter, BL1 installs a simple stub. The stub expects to receive a limited set of SMC types (determined by their function IDs in the general purpose register
X0/R0):BL1_SMC_RUN_IMAGE: This SMC is raised by BL2 to make BL1 pass control to EL3 Runtime Software.All SMCs listed in section “BL1 SMC Interface” in the Firmware Update (FWU) Design Guide are supported for AArch64 only. These SMCs are currently not supported when BL1 is built for AArch32.
Any other SMC leads to an assertion failure.
CPU initialization
BL1 calls the
reset_handlermacro/function which in turn calls the CPU specific reset handler function (see the section: “CPU specific operations framework”).
5.4.1.2.3. Platform initialization
On Arm platforms, BL1 performs the following platform initializations:
Enable the Trusted Watchdog.
Initialize the console.
Configure the Interconnect to enable hardware coherency.
Enable the MMU and map the memory it needs to access.
Configure any required platform storage to load the next bootloader image (BL2).
If the BL1 dynamic configuration file,
TB_FW_CONFIG, is available, then load it to the platform defined address and make it available to BL2 viaarg0.Configure the system timer and program the CNTFRQ_EL0 for use by NS-BL1U and NS-BL2U firmware update images.
5.4.1.2.4. Firmware Update detection and execution
After performing platform setup, BL1 common code calls
bl1_plat_get_next_image_id() to determine if Firmware Update (FWU) is
required or to proceed with the normal boot process. If the platform code
returns BL2_IMAGE_ID then the normal boot sequence is executed as described
in the next section, else BL1 assumes that Firmware Update (FWU) is
required and execution passes to the first image in the
Firmware Update (FWU) process. In either case, BL1 retrieves a descriptor
of the next image by calling bl1_plat_get_image_desc(). The image descriptor
contains an entry_point_info_t structure, which BL1 uses to initialize the
execution state of the next image.
5.4.1.2.5. BL2 image load and execution
In the normal boot flow, BL1 execution continues as follows:
BL1 prints the following string from the primary CPU to indicate successful execution of the BL1 stage:
"Booting Trusted Firmware"BL1 loads a BL2 raw binary image from platform storage, at a platform-specific base address. Prior to the load, BL1 invokes
bl1_plat_handle_pre_image_load()which allows the platform to update or use the image information. If the BL2 image file is not present or if there is not enough free trusted SRAM the following error message is printed:"Failed to load BL2 firmware."BL1 invokes
bl1_plat_handle_post_image_load()which again is intended for platforms to take further action after image load. This function must populate the necessary arguments for BL2, which may also include the memory layout. Further description of the memory layout can be found later in this document.BL1 passes control to the BL2 image at Secure EL1 (for AArch64) or at Secure SVC mode (for AArch32), starting from its load address.
5.4.1.3. BL2
BL1 loads and passes control to BL2 at Secure-EL1 (for AArch64) or at Secure SVC mode (for AArch32) . BL2 is linked against and loaded at a platform-specific base address (more information can be found later in this document). The functionality implemented by BL2 is as follows.
5.4.1.3.1. Architectural initialization
For AArch64, BL2 performs the minimal architectural initialization required
for subsequent stages of TF-A and normal world software. EL1 and EL0 are given
access to Floating Point and Advanced SIMD registers by setting the
CPACR.FPEN bits.
For AArch32, the minimal architectural initialization required for subsequent stages of TF-A and normal world software is taken care of in BL1 as both BL1 and BL2 execute at PL1.
5.4.1.3.2. Platform initialization
On Arm platforms, BL2 performs the following platform initializations:
Initialize the console.
Configure any required platform storage to allow loading further bootloader images.
Enable the MMU and map the memory it needs to access.
Perform platform security setup to allow access to controlled components.
Reserve some memory for passing information to the next bootloader image EL3 Runtime Software and populate it.
Define the extents of memory available for loading each subsequent bootloader image.
If BL1 has passed TB_FW_CONFIG dynamic configuration file in
arg0, then parse it.
5.4.1.3.3. Image loading in BL2
BL2 generic code loads the images based on the list of loadable images provided by the platform. BL2 passes the list of executable images provided by the platform to the next handover BL image.
The list of loadable images provided by the platform may also contain
dynamic configuration files. The files are loaded and can be parsed as
needed in the bl2_plat_handle_post_image_load() function. These
configuration files can be passed to next Boot Loader stages as arguments
by updating the corresponding entrypoint information in this function.
5.4.1.3.4. SCP_BL2 (System Control Processor Firmware) image load
Some systems have a separate System Control Processor (SCP) for power, clock, reset and system control. BL2 loads the optional SCP_BL2 image from platform storage into a platform-specific region of secure memory. The subsequent handling of SCP_BL2 is platform specific. For example, on the Juno Arm development platform port the image is transferred into SCP’s internal memory using the Boot Over MHU (BOM) protocol after being loaded in the trusted SRAM memory. The SCP executes SCP_BL2 and signals to the Application Processor (AP) for BL2 execution to continue.
5.4.1.3.5. EL3 Runtime Software image load
BL2 loads the EL3 Runtime Software image from platform storage into a platform- specific address in trusted SRAM. If there is not enough memory to load the image or image is missing it leads to an assertion failure.
5.4.1.3.6. AArch64 BL32 (Secure-EL1 Payload) image load
BL2 loads the optional BL32 image from platform storage into a platform-
specific region of secure memory. The image executes in the secure world. BL2
relies on BL31 to pass control to the BL32 image, if present. Hence, BL2
populates a platform-specific area of memory with the entrypoint/load-address
of the BL32 image. The value of the Saved Processor Status Register (SPSR)
for entry into BL32 is not determined by BL2, it is initialized by the
Secure-EL1 Payload Dispatcher (see later) within BL31, which is responsible for
managing interaction with BL32. This information is passed to BL31.
5.4.1.3.7. BL33 (Non-trusted Firmware) image load
BL2 loads the BL33 image (e.g. UEFI or other test or boot software) from platform storage into non-secure memory as defined by the platform.
BL2 relies on EL3 Runtime Software to pass control to BL33 once secure state
initialization is complete. Hence, BL2 populates a platform-specific area of
memory with the entrypoint and Saved Program Status Register (SPSR) of the
normal world software image. The entrypoint is the load address of the BL33
image. The SPSR is determined as specified in Section 5.13 of the
PSCI. This information is passed to the EL3 Runtime Software.
5.4.1.3.8. AArch64 BL31 (EL3 Runtime Software) execution
BL2 execution continues as follows:
BL2 passes control back to BL1 by raising an SMC, providing BL1 with the BL31 entrypoint. The exception is handled by the SMC exception handler installed by BL1.
BL1 turns off the MMU and flushes the caches. It clears the
SCTLR_EL3.M/I/Cbits, flushes the data cache to the point of coherency and invalidates the TLBs.BL1 passes control to BL31 at the specified entrypoint at EL3.
5.4.1.4. Running BL2 at EL3 execution level
Some platforms have a non-TF-A Boot ROM that expects the next boot stage to execute at EL3. On these platforms, TF-A BL1 is a waste of memory as its only purpose is to ensure TF-A BL2 is entered at S-EL1. To avoid this waste, a special mode enables BL2 to execute at EL3, which allows a non-TF-A Boot ROM to load and jump directly to BL2. This mode is selected when the build flag RESET_TO_BL2 is enabled. The main differences in this mode are:
BL2 includes the reset code and the mailbox mechanism to differentiate cold boot and warm boot. It runs at EL3 doing the arch initialization required for EL3.
BL2 does not receive the meminfo information from BL1 anymore. This information can be passed by the Boot ROM or be internal to the BL2 image.
Since BL2 executes at EL3, BL2 jumps directly to the next image, instead of invoking the RUN_IMAGE SMC call.
We assume 3 different types of BootROM support on the platform:
The Boot ROM always jumps to the same address, for both cold and warm boot. In this case, we will need to keep a resident part of BL2 whose memory cannot be reclaimed by any other image. The linker script defines the symbols __TEXT_RESIDENT_START__ and __TEXT_RESIDENT_END__ that allows the platform to configure correctly the memory map.
The platform has some mechanism to indicate the jump address to the Boot ROM. Platform code can then program the jump address with psci_warmboot_entrypoint during cold boot.
The platform has some mechanism to program the reset address using the PROGRAMMABLE_RESET_ADDRESS feature. Platform code can then program the reset address with psci_warmboot_entrypoint during cold boot, bypassing the boot ROM for warm boot.
In the last 2 cases, no part of BL2 needs to remain resident at runtime. In the first 2 cases, we expect the Boot ROM to be able to differentiate between warm and cold boot, to avoid loading BL2 again during warm boot.
This functionality can be tested with FVP loading the image directly in memory and changing the address where the system jumps at reset. For example:
-C cluster0.cpu0.RVBAR=0x4022000 –data cluster0.cpu0=bl2.bin@0x4022000
With this configuration, FVP is like a platform of the first case, where the Boot ROM jumps always to the same address. For simplification, BL32 is loaded in DRAM in this case, to avoid other images reclaiming BL2 memory.
5.4.1.5. AArch64 BL31
The image for this stage is loaded by BL2 and BL1 passes control to BL31 at EL3. BL31 executes solely in trusted SRAM. BL31 is linked against and loaded at a platform-specific base address (more information can be found later in this document). The functionality implemented by BL31 is as follows.
5.4.1.5.1. Architectural initialization
Currently, BL31 performs a similar architectural initialization to BL1 as far as system register settings are concerned. Since BL1 code resides in ROM, architectural initialization in BL31 allows override of any previous initialization done by BL1.
BL31 initializes the per-CPU data framework, which provides a cache of frequently accessed per-CPU data optimised for fast, concurrent manipulation on different CPUs. This buffer includes pointers to per-CPU contexts, crash buffer, CPU reset and power down operations, PSCI data, platform data and so on.
It then replaces the exception vectors populated by BL1 with its own. BL31 exception vectors implement more elaborate support for handling SMCs since this is the only mechanism to access the runtime services implemented by BL31 (PSCI for example). BL31 checks each SMC for validity as specified by the SMC Calling Convention before passing control to the required SMC handler routine.
BL31 programs the CNTFRQ_EL0 register with the clock frequency of the system
counter, which is provided by the platform.
5.4.1.5.2. Platform initialization
BL31 performs detailed platform initialization, which enables normal world software to function correctly.
On Arm platforms, this consists of the following:
Initialize the console.
Configure the Interconnect to enable hardware coherency.
Enable the MMU and map the memory it needs to access.
Initialize the generic interrupt controller.
Initialize the power controller device.
Detect the system topology.
5.4.1.5.3. Runtime services initialization
BL31 is responsible for initializing the runtime services. One of them is PSCI.
As part of the PSCI initializations, BL31 detects the system topology. It also
initializes the data structures that implement the state machine used to track
the state of power domain nodes. The state can be one of OFF, RUN or
RETENTION. All secondary CPUs are initially in the OFF state. The cluster
that the primary CPU belongs to is ON; any other cluster is OFF. It also
initializes the locks that protect them. BL31 accesses the state of a CPU or
cluster immediately after reset and before the data cache is enabled in the
warm boot path. It is not currently possible to use ‘exclusive’ based spinlocks,
therefore BL31 uses locks based on Lamport’s Bakery algorithm instead.
The runtime service framework and its initialization is described in more detail in the “EL3 runtime services framework” section below.
Details about the status of the PSCI implementation are provided in the “Power State Coordination Interface” section below.
5.4.1.5.4. AArch64 BL32 (Secure-EL1 Payload) image initialization
If a BL32 image is present then there must be a matching Secure-EL1 Payload Dispatcher (SPD) service (see later for details). During initialization that service must register a function to carry out initialization of BL32 once the runtime services are fully initialized. BL31 invokes such a registered function to initialize BL32 before running BL33. This initialization is not necessary for AArch32 SPs.
Details on BL32 initialization and the SPD’s role are described in the Secure-EL1 Payloads and Dispatchers section below.
5.4.1.5.5. BL33 (Non-trusted Firmware) execution
EL3 Runtime Software initializes the EL2 or EL1 processor context for normal- world cold boot, ensuring that no secure state information finds its way into the non-secure execution state. EL3 Runtime Software uses the entrypoint information provided by BL2 to jump to the Non-trusted firmware image (BL33) at the highest available Exception Level (EL2 if available, otherwise EL1).
5.4.1.6. Using alternative Trusted Boot Firmware in place of BL1 & BL2 (AArch64 only)
Some platforms have existing implementations of Trusted Boot Firmware that would like to use TF-A BL31 for the EL3 Runtime Software. To enable this firmware architecture it is important to provide a fully documented and stable interface between the Trusted Boot Firmware and BL31.
Future changes to the BL31 interface will be done in a backwards compatible way, and this enables these firmware components to be independently enhanced/ updated to develop and exploit new functionality.
5.4.1.6.1. Required CPU state when calling bl31_entrypoint() during cold boot
This function must only be called by the primary CPU.
On entry to this function the calling primary CPU must be executing in AArch64 EL3, little-endian data access, and all interrupt sources masked:
PSTATE.EL = 3
PSTATE.RW = 1
PSTATE.DAIF = 0xf
SCTLR_EL3.EE = 0
X0 and X1 can be used to pass information from the Trusted Boot Firmware to the platform code in BL31:
X0 : Reserved for common TF-A information
X1 : Platform specific information
BL31 zero-init sections (e.g. .bss) should not contain valid data on entry,
these will be zero filled prior to invoking platform setup code.
5.4.1.6.1.1. Use of the X0 and X1 parameters
The parameters are platform specific and passed from bl31_entrypoint() to
bl31_early_platform_setup(). The value of these parameters is never directly
used by the common BL31 code.
Legacy platforms may still pass a bl31_params structure in X0, while TL
adopted platforms may use Transfer List; both are platform-specific.
5.4.1.6.1.2. MMU, Data caches & Coherency
BL31 does not depend on the enabled state of the MMU, data caches or
interconnect coherency on entry to bl31_entrypoint(). If these are disabled
on entry, these should be enabled during bl31_plat_arch_setup().
5.4.1.6.1.3. Data structures used in the BL31 cold boot interface
In the cold boot flow, entry_point_info is used to represent the execution
state of an image; that is, the state of general purpose registers, PC, and
SPSR.
There are two variants of this structure, for AArch64:
typedef struct entry_point_info {
param_header_t h;
uintptr_t pc;
uint32_t spsr;
aapcs64_params_t args;
}
and, AArch32:
typedef struct entry_point_info {
param_header_t h;
uintptr_t pc;
uint32_t spsr;
uintptr_t lr_svc;
aapcs32_params_t args;
} entry_point_info_t;
These structures are designed to support compatibility and independent evolution of the structures and the firmware images. For example, a version of BL31 that can interpret the BL3x image information from different versions of BL2, a platform that uses an extended entry_point_info structure to convey additional register information to BL31, or a ELF image loader that can convey more details about the firmware images.
To support these scenarios the structures are versioned and sized, which enables
BL31 to detect which information is present and respond appropriately. The
param_header is defined to capture this information:
typedef struct param_header {
uint8_t type; /* type of the structure */
uint8_t version; /* version of this structure */
uint16_t size; /* size of this structure in bytes */
uint32_t attr; /* attributes */
} param_header_t;
In entry_point_info, Bits 0 and 5 of attr field are used to encode the
security state; in other words, whether the image is to be executed in Secure,
Non-Secure, or Realm mode.
Other structures using this format are image_info and bl31_params. The
code that allocates and populates these structures must set the header fields
appropriately, the SET_PARAM_HEAD() macro is defined to simplify this
action.
5.4.1.6.2. Required CPU state for BL31 Warm boot initialization
When requesting a CPU power-on, or suspending a running CPU, TF-A provides the platform power management code with a Warm boot initialization entry-point, to be invoked by the CPU immediately after the reset handler. On entry to the Warm boot initialization function the calling CPU must be in AArch64 EL3, little-endian data access and all interrupt sources masked:
PSTATE.EL = 3
PSTATE.RW = 1
PSTATE.DAIF = 0xf
SCTLR_EL3.EE = 0
The PSCI implementation will initialize the processor state and ensure that the platform power management code is then invoked as required to initialize all necessary system, cluster and CPU resources.
5.4.1.7. AArch32 EL3 Runtime Software entrypoint interface
To enable this firmware architecture it is important to provide a fully documented and stable interface between the Trusted Boot Firmware and the AArch32 EL3 Runtime Software.
Future changes to the entrypoint interface will be done in a backwards compatible way, and this enables these firmware components to be independently enhanced/updated to develop and exploit new functionality.
5.4.1.7.1. Required CPU state when entering during cold boot
This function must only be called by the primary CPU.
On entry to this function the calling primary CPU must be executing in AArch32 EL3, little-endian data access, and all interrupt sources masked:
PSTATE.AIF = 0x7
SCTLR.EE = 0
R0 and R1 are used to pass information from the Trusted Boot Firmware to the platform code in AArch32 EL3 Runtime Software:
R0 : Reserved for common TF-A information
R1 : Platform specific information
5.4.1.7.1.1. Use of the R0 and R1 parameters
The parameters are platform specific and the convention is that R0 conveys
information regarding the BL3x images from the Trusted Boot firmware and R1
can be used for other platform specific purpose. This convention allows
platforms which use TF-A’s BL1 and BL2 images to transfer additional platform
specific information from Secure Boot without conflicting with future
evolution of TF-A using R0 to pass a bl_params structure.
The AArch32 EL3 Runtime Software is responsible for entry into BL33. This information can be obtained in a platform defined manner, e.g. compiled into the AArch32 EL3 Runtime Software, or provided in a platform defined memory location by the Trusted Boot firmware, or passed from the Trusted Boot Firmware via the Cold boot Initialization parameters. This data may need to be cleaned out of the CPU caches if it is provided by an earlier boot stage and then accessed by AArch32 EL3 Runtime Software before the caches are enabled.
When using AArch32 EL3 Runtime Software, the Arm development platforms pass a
bl_params structure in R0 from BL2 to be interpreted by AArch32 EL3 Runtime
Software platform code.
5.4.1.7.1.2. MMU, Data caches & Coherency
AArch32 EL3 Runtime Software must not depend on the enabled state of the MMU, data caches or interconnect coherency in its entrypoint. They must be explicitly enabled if required.
5.4.1.7.1.3. Data structures used in cold boot interface
The AArch32 EL3 Runtime Software cold boot interface uses bl_params instead
of bl31_params. The bl_params structure is based on the convention
described in AArch64 BL31 cold boot interface section.
5.4.1.7.2. Required CPU state for warm boot initialization
When requesting a CPU power-on, or suspending a running CPU, AArch32 EL3 Runtime Software must ensure execution of a warm boot initialization entrypoint. If TF-A BL1 is used and the PROGRAMMABLE_RESET_ADDRESS build flag is false, then AArch32 EL3 Runtime Software must ensure that BL1 branches to the warm boot entrypoint by arranging for the BL1 platform function, plat_get_my_entrypoint(), to return a non-zero value.
In this case, the warm boot entrypoint must be in AArch32 EL3, little-endian data access and all interrupt sources masked:
PSTATE.AIF = 0x7
SCTLR.EE = 0
The warm boot entrypoint may be implemented by using TF-A
psci_warmboot_entrypoint() function. In that case, the platform must fulfil
the pre-requisites mentioned in the Porting Guide.
5.4.2. EL3 runtime services framework
Software executing in the non-secure state and in the secure state at exception levels lower than EL3 will request runtime services using the Secure Monitor Call (SMC) instruction. These requests will follow the convention described in the SMC Calling Convention PDD (SMCCC). The SMCCC assigns function identifiers to each SMC request and describes how arguments are passed and returned.
The EL3 runtime services framework enables the development of services by different providers that can be easily integrated into final product firmware. The following sections describe the framework which facilitates the registration, initialization and use of runtime services in EL3 Runtime Software (BL31).
The design of the runtime services depends heavily on the concepts and definitions described in the SMCCC, in particular SMC Function IDs, Owning Entity Numbers (OEN), Fast and Yielding calls, and the SMC32 and SMC64 calling conventions. Please refer to that document for more detailed explanation of these terms.
The following runtime services are expected to be implemented first. They have not all been instantiated in the current implementation.
Standard service calls
This service is for management of the entire system. The Power State Coordination Interface (PSCI) is the first set of standard service calls defined by Arm (see PSCI section later).
Secure-EL1 Payload Dispatcher service
If a system runs a Trusted OS or other Secure-EL1 Payload (SP) then it also requires a Secure Monitor at EL3 to switch the EL1 processor context between the normal world (EL1/EL2) and trusted world (Secure-EL1). The Secure Monitor will make these world switches in response to SMCs. The SMCCC provides for such SMCs with the Trusted OS Call and Trusted Application Call OEN ranges.
The interface between the EL3 Runtime Software and the Secure-EL1 Payload is not defined by the SMCCC or any other standard. As a result, each Secure-EL1 Payload requires a specific Secure Monitor that runs as a runtime service - within TF-A this service is referred to as the Secure-EL1 Payload Dispatcher (SPD).
TF-A provides a Test Secure-EL1 Payload (TSP) and its associated Dispatcher (TSPD). Details of SPD design and TSP/TSPD operation are described in the Secure-EL1 Payloads and Dispatchers section below.
CPU implementation service
This service will provide an interface to CPU implementation specific services for a given platform e.g. access to processor errata workarounds. This service is currently unimplemented.
Additional services for Arm Architecture, SiP and OEM calls can be implemented. Each implemented service handles a range of SMC function identifiers as described in the SMCCC.
5.4.2.1. Registration
A runtime service is registered using the DECLARE_RT_SVC() macro, specifying
the name of the service, the range of OENs covered, the type of service and
initialization and call handler functions. This macro instantiates a const struct rt_svc_desc for the service with these details (see runtime_svc.h).
This structure is allocated in a special ELF section .rt_svc_descs, enabling
the framework to find all service descriptors included into BL31.
The specific service for a SMC Function is selected based on the OEN and call type of the Function ID, and the framework uses that information in the service descriptor to identify the handler for the SMC Call.
The service descriptors do not include information to identify the precise set of SMC function identifiers supported by this service implementation, the security state from which such calls are valid nor the capability to support 64-bit and/or 32-bit callers (using SMC32 or SMC64). Responding appropriately to these aspects of a SMC call is the responsibility of the service implementation, the framework is focused on integration of services from different providers and minimizing the time taken by the framework before the service handler is invoked.
Details of the parameters, requirements and behavior of the initialization and call handling functions are provided in the following sections.
5.4.2.2. Initialization
runtime_svc_init() in runtime_svc.c initializes the runtime services
framework running on the primary CPU during cold boot as part of the BL31
initialization. This happens prior to initializing a Trusted OS and running
Normal world boot firmware that might in turn use these services.
Initialization involves validating each of the declared runtime service
descriptors, calling the service initialization function and populating the
index used for runtime lookup of the service.
The BL31 linker script collects all of the declared service descriptors into a single array and defines symbols that allow the framework to locate and traverse the array, and determine its size.
The framework does basic validation of each descriptor to halt firmware initialization if service declaration errors are detected. The framework does not check descriptors for the following error conditions, and may behave in an unpredictable manner under such scenarios:
Overlapping OEN ranges
Multiple descriptors for the same range of OENs and
call_typeIncorrect range of owning entity numbers for a given
call_type
Once validated, the service init() callback is invoked. This function carries
out any essential EL3 initialization before servicing requests. The init()
function is only invoked on the primary CPU during cold boot. If the service
uses per-CPU data this must either be initialized for all CPUs during this call,
or be done lazily when a CPU first issues an SMC call to that service. If
init() returns anything other than 0, this is treated as an initialization
error and the service is ignored: this does not cause the firmware to halt.
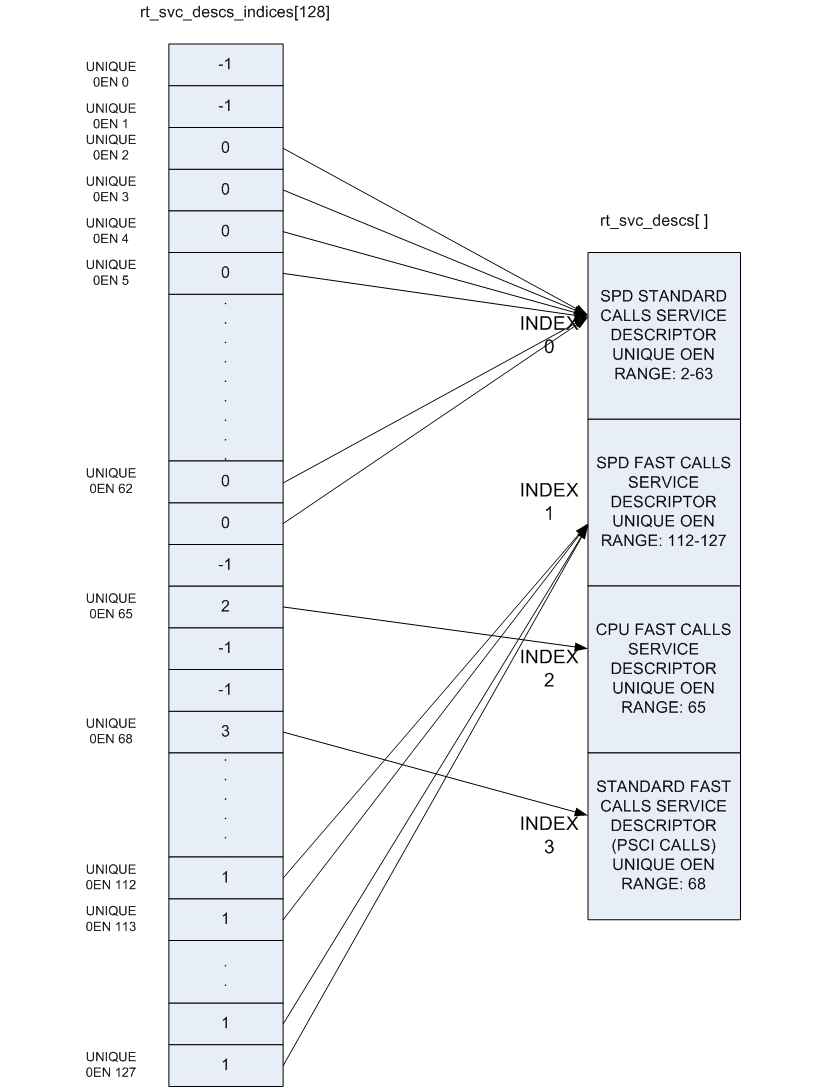
The OEN and call type fields present in the SMC Function ID cover a total of
128 distinct services, but in practice a single descriptor can cover a range of
OENs, e.g. SMCs to call a Trusted OS function. To optimize the lookup of a
service handler, the framework uses an array of 128 indices that map every
distinct OEN/call-type combination either to one of the declared services or to
indicate the service is not handled. This rt_svc_descs_indices[] array is
populated for all of the OENs covered by a service after the service init()
function has reported success. So a service that fails to initialize will never
have it’s handle() function invoked.
The following figure shows how the rt_svc_descs_indices[] index maps the SMC
Function ID call type and OEN onto a specific service handler in the
rt_svc_descs[] array.
5.4.2.3. Handling an SMC
When the EL3 runtime services framework receives a Secure Monitor Call, the SMC
Function ID is passed in W0 from the lower exception level (as per the
SMCCC). If the calling register width is AArch32, it is invalid to invoke an
SMC Function which indicates the SMC64 calling convention: such calls are
ignored and return the Unknown SMC Function Identifier result code 0xFFFFFFFF
in R0/X0.
Bit[31] (fast/yielding call) and bits[29:24] (owning entity number) of the SMC
Function ID are combined to index into the rt_svc_descs_indices[] array. The
resulting value might indicate a service that has no handler, in this case the
framework will also report an Unknown SMC Function ID. Otherwise, the value is
used as a further index into the rt_svc_descs[] array to locate the required
service and handler.
The service’s handle() callback is provided with five of the SMC parameters
directly, the others are saved into memory for retrieval (if needed) by the
handler. The handler is also provided with an opaque handle for use with the
supporting library for parameter retrieval, setting return values and context
manipulation. The flags parameter indicates the security state of the caller
and the state of the SVE hint bit per the SMCCCv1.3. The framework finally sets
up the execution stack for the handler, and invokes the services handle()
function.
On return from the handler the result registers are populated in X0-X7 as needed before restoring the stack and CPU state and returning from the original SMC.
5.4.3. Exception Handling Framework
Please refer to the Exception Handling Framework document.
5.4.4. Power State Coordination Interface
TODO: Provide design walkthrough of PSCI implementation.
The PSCI v1.1 specification categorizes APIs as optional and mandatory. All the mandatory APIs in PSCI v1.1, PSCI v1.0 and in PSCI v0.2 draft specification PSCI are implemented. The table lists the PSCI v1.1 APIs and their support in generic code.
An API implementation might have a dependency on platform code e.g. CPU_SUSPEND requires the platform to export a part of the implementation. Hence the level of support of the mandatory APIs depends upon the support exported by the platform port as well. The Juno and FVP (all variants) platforms export all the required support.
PSCI v1.1 API |
Supported |
Comments |
|---|---|---|
|
Yes |
The version returned is 1.1 |
|
Yes* |
|
|
Yes* |
|
|
Yes* |
|
|
Yes |
|
|
Yes** |
|
|
Yes** |
|
|
Yes** |
|
|
Yes* |
|
|
Yes* |
|
|
Yes |
|
|
No |
|
|
No |
|
|
Yes* |
|
|
Yes* |
|
|
No |
|
|
Yes* |
|
|
Yes* |
|
|
Yes* |
|
|
Yes* |
|
|
Yes* |
*Note : These PSCI APIs require platform power management hooks to be registered with the generic PSCI code to be supported.
**Note : These PSCI APIs require appropriate Secure Payload Dispatcher hooks to be registered with the generic PSCI code to be supported.
The PSCI implementation in TF-A is a library which can be integrated with AArch64 or AArch32 EL3 Runtime Software for Armv8-A systems. A guide to integrating the PSCI library for EL3 Runtime Software can be found at Porting Guide.
5.4.5. DSU driver
Platforms that include a DSU (DynamIQ Shared Unit) can define
the USE_DSU_DRIVER build flag to enable the DSU driver.
This driver is responsible for configuring DSU-related powerdown
and power feature settings, enabling access to PMU registers at EL1
using dsu_driver_init() and for preserving the context of DSU
PMU system registers.
To support the DSU driver, platforms must define the plat_dsu_data
structure.
5.4.6. Secure-EL1 Payloads and Dispatchers
On a production system that includes a Trusted OS running in Secure-EL1/EL0, the Trusted OS is coupled with a companion runtime service in the BL31 firmware. This service is responsible for the initialisation of the Trusted OS and all communications with it. The Trusted OS is the BL32 stage of the boot flow in TF-A. The firmware will attempt to locate, load and execute a BL32 image.
TF-A uses a more general term for the BL32 software that runs at Secure-EL1 - the Secure-EL1 Payload - as it is not always a Trusted OS.
TF-A provides a Test Secure-EL1 Payload (TSP) and a Test Secure-EL1 Payload
Dispatcher (TSPD) service as an example of how a Trusted OS is supported on a
production system using the Runtime Services Framework. On such a system, the
Test BL32 image and service are replaced by the Trusted OS and its dispatcher
service. The TF-A build system expects that the dispatcher will define the
build flag NEED_BL32 to enable it to include the BL32 in the build either
as a binary or to compile from source depending on whether the BL32 build
option is specified or not.
The TSP runs in Secure-EL1. It is designed to demonstrate synchronous communication with the normal-world software running in EL1/EL2. Communication is initiated by the normal-world software
either directly through a Fast SMC (as defined in the SMCCC)
or indirectly through a PSCI SMC. The PSCI implementation in turn informs the TSPD about the requested power management operation. This allows the TSP to prepare for or respond to the power state change
The TSPD service is responsible for.
Initializing the TSP
Routing requests and responses between the secure and the non-secure states during the two types of communications just described
5.4.6.1. Initializing a BL32 Image
The Secure-EL1 Payload Dispatcher (SPD) service is responsible for initializing the BL32 image. It needs access to the information passed by BL2 to BL31 to do so. This is provided by:
entry_point_info_t *bl31_plat_get_next_image_ep_info(uint32_t);
which returns a reference to the entry_point_info structure corresponding to
the image which will be run in the specified security state. The SPD uses this
API to get entry point information for the SECURE image, BL32.
In the absence of a BL32 image, BL31 passes control to the normal world bootloader image (BL33). When the BL32 image is present, it is typical that the SPD wants control to be passed to BL32 first and then later to BL33.
To do this the SPD has to register a BL32 initialization function during initialization of the SPD service. The BL32 initialization function has this prototype:
int32_t init(void);
and is registered using the bl31_register_bl32_init() function.
TF-A supports two approaches for the SPD to pass control to BL32 before returning through EL3 and running the non-trusted firmware (BL33):
In the BL32 setup function, use
bl31_set_next_image_type()to request that the exit frombl31_main()is to the BL32 entrypoint in Secure-EL1. BL31 will exit to BL32 using the asynchronous method by callingbl31_prepare_next_image_entry()andel3_exit().When the BL32 has completed initialization at Secure-EL1, it returns to BL31 by issuing an SMC, using a Function ID allocated to the SPD. On receipt of this SMC, the SPD service handler should switch the CPU context from trusted to normal world and use the
bl31_set_next_image_type()andbl31_prepare_next_image_entry()functions to set up the initial return to the normal world firmware BL33. On return from the handler the framework will exit to EL2 and run BL33.The BL32 setup function registers an initialization function using
bl31_register_bl32_init()which provides a SPD-defined mechanism to invoke a ‘world-switch synchronous call’ to Secure-EL1 to run the BL32 entrypoint.Note
The Test SPD service included with TF-A provides one implementation of such a mechanism.
On completion BL32 returns control to BL31 via a SMC, and on receipt the SPD service handler invokes the synchronous call return mechanism to return to the BL32 initialization function. On return from this function,
bl31_main()will set up the return to the normal world firmware BL33 and continue the boot process in the normal world.
5.4.7. Exception handling in BL31
When exception occurs, PE must execute handler corresponding to exception. The location in memory where the handler is stored is called the exception vector. For ARM architecture, exception vectors are stored in a table, called the exception vector table.
Each EL (except EL0) has its own vector table, VBAR_ELn register stores the base of vector table. Refer to AArch64 exception vector table
5.4.7.1. Current EL with SP_EL0
Sync exception : Not expected except for BRK instruction, its debugging tool which a programmer may place at specific points in a program, to check the state of processor flags at these points in the code.
IRQ/FIQ : Unexpected exception, panic
SError : “plat_handle_el3_ea”, defaults to panic
5.4.7.2. Current EL with SP_ELx
Sync exception : Unexpected exception, panic
IRQ/FIQ : Unexpected exception, panic
SError : “plat_handle_el3_ea” Except for special handling of lower EL’s SError exception which gets triggered in EL3 when PSTATE.A is unmasked. Its only applicable when lower EL’s EA is routed to EL3 (FFH_SUPPORT=1).
5.4.7.3. Lower EL Exceptions
Applies to all the exceptions in both AArch64/AArch32 mode of lower EL.
Before handling any lower EL exception, we synchronize the errors at EL3 entry to ensure that any errors pertaining to lower EL is isolated/identified. If we continue without identifying these errors early on then these errors will trigger in EL3 (as SError from current EL) any time after PSTATE.A is unmasked. This is wrong because the error originated in lower EL but exception happened in EL3.
To solve this problem, synchronize the errors at EL3 entry and check for any pending errors (async EA). If there is no pending error then continue with original exception. If there is a pending error then, handle them based on routing model of EA’s. Refer to Reliability, Availability, and Serviceability (RAS) Extensions for details about routing models.
KFH : Reflect it back to lower EL using reflect_pending_async_ea_to_lower_el()
FFH : Handle the synchronized error first using handle_pending_async_ea() after that continue with original exception. It is the only scenario where EL3 is capable of doing nested exception handling.
After synchronizing and handling lower EL SErrors, unmask EA (PSTATE.A) to ensure that any further EA’s caused by EL3 are caught.
5.4.8. Crash Reporting in BL31
BL31 implements a scheme for reporting the processor state when an unhandled exception is encountered. The reporting mechanism attempts to preserve all the register contents and report it via a dedicated UART (PL011 console). BL31 reports the general purpose, EL3, Secure EL1 and some EL2 state registers.
A dedicated per-CPU crash stack is maintained by BL31 and this is retrieved via
the per-CPU pointer cache. The implementation attempts to minimise the memory
required for this feature. The file crash_reporting.S contains the
implementation for crash reporting.
The sample crash output is shown below.
x0 = 0x000000002a4a0000
x1 = 0x0000000000000001
x2 = 0x0000000000000002
x3 = 0x0000000000000003
x4 = 0x0000000000000004
x5 = 0x0000000000000005
x6 = 0x0000000000000006
x7 = 0x0000000000000007
x8 = 0x0000000000000008
x9 = 0x0000000000000009
x10 = 0x0000000000000010
x11 = 0x0000000000000011
x12 = 0x0000000000000012
x13 = 0x0000000000000013
x14 = 0x0000000000000014
x15 = 0x0000000000000015
x16 = 0x0000000000000016
x17 = 0x0000000000000017
x18 = 0x0000000000000018
x19 = 0x0000000000000019
x20 = 0x0000000000000020
x21 = 0x0000000000000021
x22 = 0x0000000000000022
x23 = 0x0000000000000023
x24 = 0x0000000000000024
x25 = 0x0000000000000025
x26 = 0x0000000000000026
x27 = 0x0000000000000027
x28 = 0x0000000000000028
x29 = 0x0000000000000029
x30 = 0x0000000088000b78
scr_el3 = 0x000000000003073d
sctlr_el3 = 0x00000000b0cd183f
cptr_el3 = 0x0000000000000000
tcr_el3 = 0x000000008080351c
daif = 0x00000000000002c0
mair_el3 = 0x00000000004404ff
spsr_el3 = 0x0000000060000349
elr_el3 = 0x0000000088000114
ttbr0_el3 = 0x0000000004018201
esr_el3 = 0x00000000be000000
far_el3 = 0x0000000000000000
spsr_el1 = 0x0000000000000000
elr_el1 = 0x0000000000000000
spsr_abt = 0x0000000000000000
spsr_und = 0x0000000000000000
spsr_irq = 0x0000000000000000
spsr_fiq = 0x0000000000000000
sctlr_el1 = 0x0000000030d00800
actlr_el1 = 0x0000000000000000
cpacr_el1 = 0x0000000000000000
csselr_el1 = 0x0000000000000000
sp_el1 = 0x0000000000000000
esr_el1 = 0x0000000000000000
ttbr0_el1 = 0x0000000000000000
ttbr1_el1 = 0x0000000000000000
mair_el1 = 0x0000000000000000
amair_el1 = 0x0000000000000000
tcr_el1 = 0x0000000000000000
tpidr_el1 = 0x0000000000000000
tpidr_el0 = 0x0000000000000000
tpidrro_el0 = 0x0000000000000000
par_el1 = 0x0000000000000000
mpidr_el1 = 0x0000000080000000
afsr0_el1 = 0x0000000000000000
afsr1_el1 = 0x0000000000000000
contextidr_el1 = 0x0000000000000000
vbar_el1 = 0x0000000000000000
cntp_ctl_el0 = 0x0000000000000000
cntp_cval_el0 = 0x0000000000000000
cntv_ctl_el0 = 0x0000000000000000
cntv_cval_el0 = 0x0000000000000000
cntkctl_el1 = 0x0000000000000000
sp_el0 = 0x0000000004014940
isr_el1 = 0x0000000000000000
dacr32_el2 = 0x0000000000000000
ifsr32_el2 = 0x0000000000000000
icc_hppir0_el1 = 0x00000000000003ff
icc_hppir1_el1 = 0x00000000000003ff
icc_ctlr_el3 = 0x0000000000080400
gicd_ispendr regs (Offsets 0x200-0x278)
Offset Value
0x200: 0x0000000000000000
0x208: 0x0000000000000000
0x210: 0x0000000000000000
0x218: 0x0000000000000000
0x220: 0x0000000000000000
0x228: 0x0000000000000000
0x230: 0x0000000000000000
0x238: 0x0000000000000000
0x240: 0x0000000000000000
0x248: 0x0000000000000000
0x250: 0x0000000000000000
0x258: 0x0000000000000000
0x260: 0x0000000000000000
0x268: 0x0000000000000000
0x270: 0x0000000000000000
0x278: 0x0000000000000000
5.4.9. Guidelines for Reset Handlers
TF-A implements a framework that allows CPU and platform ports to perform
actions very early after a CPU is released from reset in both the cold and warm
boot paths. This is done by calling the reset_handler macro/function in both
the BL1 and BL31 images. It in turn calls the platform and CPU specific reset
handling functions.
Details for implementing a CPU specific reset handler can be found in CPU specific Reset Handling. Details for implementing a platform specific reset handler can be found in the Porting Guide (see the``plat_reset_handler()`` function).
When adding functionality to a reset handler, keep in mind that if a different reset handling behavior is required between the first and the subsequent invocations of the reset handling code, this should be detected at runtime. In other words, the reset handler should be able to detect whether an action has already been performed and act as appropriate. Possible courses of actions are, e.g. skip the action the second time, or undo/redo it.
5.4.10. Configuring secure interrupts
The GIC driver is responsible for performing initial configuration of secure interrupts on the platform. To this end, the platform is expected to provide the GIC driver (either GICv2 or GICv3, as selected by the platform) with the interrupt configuration during the driver initialisation.
Secure interrupt configuration are specified in an array of secure interrupt
properties. In this scheme, in both GICv2 and GICv3 driver data structures, the
interrupt_props member points to an array of interrupt properties. Each
element of the array specifies the interrupt number and its attributes
(priority, group, configuration). Each element of the array shall be populated
by the macro INTR_PROP_DESC(). The macro takes the following arguments:
13-bit interrupt number,
8-bit interrupt priority,
Interrupt type (one of
INTR_TYPE_EL3,INTR_TYPE_S_EL1,INTR_TYPE_NS),Interrupt configuration (either
GIC_INTR_CFG_LEVELorGIC_INTR_CFG_EDGE).
5.4.11. CPU specific operations framework
Certain aspects of the Armv8-A architecture are implementation defined, that is, certain behaviours are not architecturally defined, but must be defined and documented by individual processor implementations. TF-A implements a framework which categorises the common implementation defined behaviours and allows a processor to export its implementation of that behaviour. The categories are:
Processor specific reset sequence.
Processor specific power down sequences.
Processor specific register dumping as a part of crash reporting.
Errata status reporting.
Each of the above categories fulfils a different requirement.
allows any processor specific initialization before the caches and MMU are turned on, like implementation of errata workarounds, entry into the intra-cluster coherency domain etc.
allows each processor to implement the power down sequence mandated in its Technical Reference Manual (TRM).
allows a processor to provide additional information to the developer in the event of a crash, for example Cortex-A53 has registers which can expose the data cache contents.
allows a processor to define a function that inspects and reports the status of all errata workarounds on that processor.
Please note that only 2. is mandated by the TRM.
The CPU specific operations framework scales to accommodate a large number of different CPUs during power down and reset handling. The platform can specify any CPU optimization it wants to enable for each CPU. It can also specify the CPU errata workarounds to be applied for each CPU type during reset handling by defining CPU errata compile time macros. Details on these macros can be found in the Arm CPU Specific Build Macros document.
The CPU specific operations framework depends on the cpu_ops structure which
needs to be exported for each type of CPU in the platform. It is defined in
include/lib/cpus/aarch64/cpu_macros.S and has the following fields : midr,
reset_func(), cpu_pwr_down_ops (array of power down functions) and
cpu_reg_dump().
The CPU specific files in lib/cpus export a cpu_ops data structure with
suitable handlers for that CPU. For example, lib/cpus/aarch64/cortex_a53.S
exports the cpu_ops for Cortex-A53 CPU. According to the platform
configuration, these CPU specific files must be included in the build by
the platform makefile. The generic CPU specific operations framework code exists
in lib/cpus/aarch64/cpu_helpers.S.
5.4.11.1. CPU PCS
All assembly functions in CPU files are asked to follow a modified version of the Procedure Call Standard (PCS) in their internals. This is done to ensure calling these functions from outside the file doesn’t unexpectedly corrupt registers in the very early environment and to help the internals to be easier to understand. Please see the CPU errata implementation for any function specific restrictions.
register |
use |
|---|---|
x0 - x15 |
scratch |
x16, x17 |
do not use (used by the linker) |
x18 |
do not use (platform register) |
x19 - x28 |
callee saved |
x29, x30 |
FP, LR |
5.4.11.2. CPU specific Reset Handling
After a reset, the state of the CPU when it calls generic reset handler is: MMU turned off, both instruction and data caches turned off, not part of any coherency domain and no stack.
The BL entrypoint code first invokes the plat_reset_handler() to allow
the platform to perform any system initialization required and any system
errata workarounds that needs to be applied. The get_cpu_ops_ptr() reads
the current CPU midr, finds the matching cpu_ops entry in the cpu_ops
array and returns it. Note that only the part number and implementer fields
in midr are used to find the matching cpu_ops entry. The reset_func() in
the returned cpu_ops is then invoked which executes the required reset
handling for that CPU and also any errata workarounds enabled by the platform.
It should be defined using the cpu_reset_func_{start,end} macros and its
body may only clobber x0 to x14 with x14 being the cpu_rev parameter. The cpu
file should also include a call to cpu_reset_prologue at the start of the
file for errata to work correctly.
5.4.11.3. CPU specific power down sequence
During the BL31 initialization sequence, the pointer to the matching cpu_ops
entry is stored in per-CPU data by cpu_data_init_cpu_ops() so that it can be quickly
retrieved during power down sequences.
Various CPU drivers register handlers to perform power down at certain power
levels for that specific CPU. The PSCI service, upon receiving a power down
request, determines the highest power level at which to execute power down
sequence for a particular CPU. It uses the prepare_cpu_pwr_dwn() function to
pick the right power down handler for the requested level. The function
retrieves cpu_ops pointer member of per-CPU data, and from that, further
retrieves cpu_pwr_down_ops array, and indexes into the required level. If the
requested power level is higher than what a CPU driver supports, the handler
registered for highest level is invoked.
At runtime the platform hooks for power down are invoked by the PSCI service to perform platform specific operations during a power down sequence, for example turning off CCI coherency during a cluster power down.
Newer CPUs include a feature called “powerdown abandon”. The feature is based on
the observation that events like GIC wakeups have a high likelihood of happening
while the core is in the middle of its powerdown sequence (at wfi). Older
cores will powerdown and immediately power back up when this happens. To save on
the work and latency involved, the newer cores will “give up” mid way through if
no context has been lost yet. This is possible as the powerdown operation is
lengthy and a large part of it does not lose context.
To cater for this possibility, the powerdown hook will be called a second time after a wakeup. The expectation is that the first call will operate as before, while the second call will undo anything the first call did. This should be done statelessly, for example by toggling the relevant bits.
5.4.11.4. CPU specific register reporting during crash
If the crash reporting is enabled in BL31, when a crash occurs, the crash
reporting framework calls do_cpu_reg_dump which retrieves the matching
cpu_ops using get_cpu_ops_ptr() function. The cpu_reg_dump() in
cpu_ops is invoked, which then returns the CPU specific register values to
be reported and a pointer to the ASCII list of register names in a format
expected by the crash reporting framework.
5.4.11.5. CPU errata implementation
Errata workarounds for CPUs supported in TF-A are applied during both cold and warm boots, shortly after reset. Individual Errata workarounds are enabled as build options. Some errata workarounds have potential run-time implications; therefore some are enabled by default, others not. Platform ports shall override build options to enable or disable errata as appropriate. The CPU drivers take care of applying errata workarounds that are enabled and applicable to a given CPU.
Each erratum has a build flag in lib/cpus/cpu-ops.mk of the form:
ERRATA_<cpu_num>_<erratum_id>. It also has a short description in
CPU Errata Workarounds on when it should apply.
5.4.11.5.1. Errata framework
The errata framework is a convention and a small library to allow errata to be automatically discovered. It enables compliant errata to be automatically applied and reported at runtime (either by status reporting or the errata ABI).
To write a compliant mitigation for erratum number erratum_id on a cpu that
declared itself (with declare_cpu_ops) as cpu_name one needs 3 things:
A CPU revision checker function:
check_erratum_<cpu_name>_<erratum_id>It should check whether this erratum applies on this revision of this CPU. It will be called with the CPU revision as its first parameter (x0) and should return one of
ERRATA_APPLIESorERRATA_NOT_APPLIES.It may only clobber x0 to x4. The rest should be treated as callee-saved.
A workaround function:
erratum_<cpu_name>_<erratum_id>_waIt should obtain the cpu revision (with
cpu_get_rev_var), call its revision checker, and perform the mitigation, should the erratum apply.It may only clobber x0 to x8. The rest should be treated as callee-saved.
Register itself to the framework
Do this with
add_erratum_entry <cpu_name>, ERRATUM(<erratum_id>), <errata_flag>where theerrata_flagis the enable flag incpu-ops.mkdescribed above.
See the next section on how to do this easily.
Note
CVEs have the format CVE_<year>_<number>. To fit them in the framework, the
erratum_id for the checker and the workaround functions become the
number part of its name and the ERRATUM(<number>) part of the
registration should instead be CVE(<year>, <number>). In the extremely
unlikely scenario where a CVE and an erratum numbers clash, the CVE number
should be prefixed with a zero.
Also, their build flag should be WORKAROUND_CVE_<year>_<number>.
Note
AArch32 uses the legacy convention. The checker function has the format
check_errata_<erratum_id> and the workaround has the format
errata_<cpu_number>_<erratum_id>_wa where cpu_number is the shortform
letter and number name of the CPU.
For CVEs the erratum_id also becomes cve_<year>_<number>.
5.4.11.5.2. Errata framework helpers
Writing these errata involves lots of boilerplate and repetitive code. On
AArch64 there are helpers to omit most of this. They are located in
include/lib/cpus/aarch64/cpu_macros.S and the preferred way to implement
errata. Please see their comments on how to use them.
The most common type of erratum workaround, one that just sets a “chicken” bit in some arbitrary register, would have an implementation for the Cortex-A77, erratum #1925769 like:
workaround_reset_start cortex_a77, ERRATUM(1925769), ERRATA_A77_1925769
sysreg_bit_set CORTEX_A77_CPUECTLR_EL1, CORTEX_A77_CPUECTLR_EL1_BIT_8
workaround_reset_end cortex_a77, ERRATUM(1925769)
check_erratum_ls cortex_a77, ERRATUM(1925769), CPU_REV(1, 1)
5.4.11.5.3. Status reporting
In a debug build of TF-A, on a CPU that comes out of reset, both BL1 and the
runtime firmware (BL31 in AArch64, and BL32 in AArch32) will invoke a generic
errata status reporting function. It will read the errata_entries list of
that cpu and will report whether each known erratum was applied and, if not,
whether it should have been.
Reporting the status of errata workaround is for informational purpose only; it has no functional significance.
5.4.12. Memory layout of BL images
Each bootloader image can be divided in 2 parts:
the static contents of the image. These are data actually stored in the binary on the disk. In the ELF terminology, they are called
PROGBITSsections;the run-time contents of the image. These are data that don’t occupy any space in the binary on the disk. The ELF binary just contains some metadata indicating where these data will be stored at run-time and the corresponding sections need to be allocated and initialized at run-time. In the ELF terminology, they are called
NOBITSsections.
All PROGBITS sections are grouped together at the beginning of the image, followed by all NOBITS sections. This is true for all TF-A images and it is governed by the linker scripts. This ensures that the raw binary images are as small as possible. If a NOBITS section was inserted in between PROGBITS sections then the resulting binary file would contain zero bytes in place of this NOBITS section, making the image unnecessarily bigger. Smaller images allow faster loading from the FIP to the main memory.
For BL31, a platform can specify an alternate location for NOBITS sections
(other than immediately following PROGBITS sections) by setting
SEPARATE_NOBITS_REGION to 1 and defining BL31_NOBITS_BASE and
BL31_NOBITS_LIMIT.
5.4.12.1. Linker scripts and symbols
Each bootloader stage image layout is described by its own linker script. The linker scripts export some symbols into the program symbol table. Their values correspond to particular addresses. TF-A code can refer to these symbols to figure out the image memory layout.
Linker symbols follow the following naming convention in TF-A.
__<SECTION>_START__Start address of a given section named
<SECTION>.__<SECTION>_END__End address of a given section named
<SECTION>. If there is an alignment constraint on the section’s end address then__<SECTION>_END__corresponds to the end address of the section’s actual contents, rounded up to the right boundary. Refer to the value of__<SECTION>_UNALIGNED_END__to know the actual end address of the section’s contents.__<SECTION>_UNALIGNED_END__End address of a given section named
<SECTION>without any padding or rounding up due to some alignment constraint.__<SECTION>_SIZE__Size (in bytes) of a given section named
<SECTION>. If there is an alignment constraint on the section’s end address then__<SECTION>_SIZE__corresponds to the size of the section’s actual contents, rounded up to the right boundary. In other words,__<SECTION>_SIZE__ = __<SECTION>_END__ - _<SECTION>_START__. Refer to the value of__<SECTION>_UNALIGNED_SIZE__to know the actual size of the section’s contents.__<SECTION>_UNALIGNED_SIZE__Size (in bytes) of a given section named
<SECTION>without any padding or rounding up due to some alignment constraint. In other words,__<SECTION>_UNALIGNED_SIZE__ = __<SECTION>_UNALIGNED_END__ - __<SECTION>_START__.
Some of the linker symbols are mandatory as TF-A code relies on them to be defined. They are listed in the following subsections. Some of them must be provided for each bootloader stage and some are specific to a given bootloader stage.
The linker scripts define some extra, optional symbols. They are not actually used by any code but they help in understanding the bootloader images’ memory layout as they are easy to spot in the link map files.
5.4.12.1.1. Common linker symbols
All BL images share the following requirements:
The BSS section must be zero-initialised before executing any C code.
The coherent memory section (if enabled) must be zero-initialised as well.
The MMU setup code needs to know the extents of the coherent and read-only memory regions to set the right memory attributes. When
SEPARATE_CODE_AND_RODATA=1, it needs to know more specifically how the read-only memory region is divided between code and data.
The following linker symbols are defined for this purpose:
__BSS_START____BSS_SIZE____COHERENT_RAM_START__Must be aligned on a page-size boundary.__COHERENT_RAM_END__Must be aligned on a page-size boundary.__COHERENT_RAM_UNALIGNED_SIZE____RO_START____RO_END____TEXT_START____TEXT_END_UNALIGNED____TEXT_END____RODATA_START____RODATA_END_UNALIGNED____RODATA_END__
5.4.12.1.2. BL1’s linker symbols
BL1 being the ROM image, it has additional requirements. BL1 resides in ROM and
it is entirely executed in place but it needs some read-write memory for its
mutable data. Its .data section (i.e. its allocated read-write data) must be
relocated from ROM to RAM before executing any C code.
The following additional linker symbols are defined for BL1:
__BL1_ROM_END__End address of BL1’s ROM contents, covering its code and.datasection in ROM.__DATA_ROM_START__Start address of the.datasection in ROM. Must be aligned on a 16-byte boundary.__DATA_RAM_START__Address in RAM where the.datasection should be copied over. Must be aligned on a 16-byte boundary.__DATA_SIZE__Size of the.datasection (in ROM or RAM).__BL1_RAM_START__Start address of BL1 read-write data.__BL1_RAM_END__End address of BL1 read-write data.
5.4.12.2. How to choose the right base addresses for each bootloader stage image
There is currently no support for dynamic image loading in TF-A. This means that all bootloader images need to be linked against their ultimate runtime locations and the base addresses of each image must be chosen carefully such that images don’t overlap each other in an undesired way. As the code grows, the base addresses might need adjustments to cope with the new memory layout.
The memory layout is completely specific to the platform and so there is no
general recipe for choosing the right base addresses for each bootloader image.
However, there are tools to aid in understanding the memory layout. These are
the link map files: build/<platform>/<build-type>/bl<x>/bl<x>.map, with <x>
being the stage bootloader. They provide a detailed view of the memory usage of
each image. Among other useful information, they provide the end address of
each image.
bl1.maplink map file provides__BL1_RAM_END__address.bl2.maplink map file provides__BL2_END__address.bl31.maplink map file provides__BL31_END__address.bl32.maplink map file provides__BL32_END__address.
For each bootloader image, the platform code must provide its start address as well as a limit address that it must not overstep. The latter is used in the linker scripts to check that the image doesn’t grow past that address. If that happens, the linker will issue a message similar to the following:
aarch64-none-elf-ld: BLx has exceeded its limit.
Additionally, if the platform memory layout implies some image overlaying like on FVP, BL31 and TSP need to know the limit address that their PROGBITS sections must not overstep. The platform code must provide those.
TF-A does not provide any mechanism to verify at boot time that the memory to load a new image is free to prevent overwriting a previously loaded image. The platform must specify the memory available in the system for all the relevant BL images to be loaded.
For example, in the case of BL1 loading BL2, bl1_plat_sec_mem_layout() will
return the region defined by the platform where BL1 intends to load BL2. The
load_image() function performs bounds check for the image size based on the
base and maximum image size provided by the platforms. Platforms must take
this behaviour into account when defining the base/size for each of the images.
5.4.12.2.1. Memory layout on Arm development platforms
The following list describes the memory layout on the Arm development platforms:
A 4KB page of shared memory is used for communication between Trusted Firmware and the platform’s power controller. This is located at the base of Trusted SRAM. The amount of Trusted SRAM available to load the bootloader images is reduced by the size of the shared memory.
The shared memory is used to store the CPUs’ entrypoint mailbox. On Juno, this is also used for the MHU payload when passing messages to and from the SCP.
Another 4 KB page is reserved for passing memory layout between BL1 and BL2 and also the dynamic firmware configurations.
On FVP, BL1 is originally sitting in the Trusted ROM at address
0x0. On Juno, BL1 resides in flash memory at address0x0BEC0000. BL1 read-write data are relocated to the top of Trusted SRAM at runtime.BL2 is loaded below BL1 RW
EL3 Runtime Software, BL31 for AArch64 and BL32 for AArch32 (e.g. SP_MIN), is loaded at the top of the Trusted SRAM, such that its NOBITS sections will overwrite BL1 R/W data and BL2. This implies that BL1 global variables remain valid only until execution reaches the EL3 Runtime Software entry point during a cold boot.
On Juno, SCP_BL2 is loaded temporarily into the EL3 Runtime Software memory region and transferred to the SCP before being overwritten by EL3 Runtime Software.
BL32 (for AArch64) can be loaded in one of the following locations:
Trusted SRAM
Trusted DRAM (FVP only)
Secure region of DRAM (top 16MB of DRAM configured by the TrustZone controller)
When BL32 (for AArch64) is loaded into Trusted SRAM, it is loaded below BL31.
The location of the BL32 image will result in different memory maps. This is illustrated for both FVP and Juno in the following diagrams, using the TSP as an example.
Note
Loading the BL32 image in TZC secured DRAM doesn’t change the memory layout of the other images in Trusted SRAM.
CONFIG section in memory layouts shown below contains:
+--------------------+
|bl2_mem_params_descs|
|--------------------|
| fw_configs |
+--------------------+
bl2_mem_params_descs contains parameters passed from BL2 to next the
BL image during boot.
fw_configs includes soc_fw_config, tos_fw_config, tb_fw_config and fw_config.
FVP with TSP in Trusted SRAM with firmware configs : (These diagrams only cover the AArch64 case)
DRAM
0xffffffff +----------+
| EL3 TZC |
0xffe00000 |----------| (secure)
| AP TZC |
0xff000000 +----------+
: :
0x82100000 |----------|
|HW_CONFIG |
0x82000000 |----------| (non-secure)
| |
0x80000000 +----------+
Trusted DRAM
0x08000000 +----------+
|HW_CONFIG |
0x07f00000 |----------|
: :
| |
0x06000000 +----------+
Trusted SRAM
0x04040000 +----------+ loaded by BL2 +----------------+
| BL1 (rw) | <<<<<<<<<<<<< | |
|----------| <<<<<<<<<<<<< | BL31 NOBITS |
| BL2 | <<<<<<<<<<<<< | |
|----------| <<<<<<<<<<<<< |----------------|
| | <<<<<<<<<<<<< | BL31 PROGBITS |
| | <<<<<<<<<<<<< |----------------|
| | <<<<<<<<<<<<< | BL32 |
0x04003000 +----------+ +----------------+
| CONFIG |
0x04001000 +----------+
| Shared |
0x04000000 +----------+
Trusted ROM
0x04000000 +----------+
| BL1 (ro) |
0x00000000 +----------+
FVP with TSP in Trusted DRAM with firmware configs (default option):
DRAM
0xffffffff +--------------+
| EL3 TZC |
0xffe00000 |--------------| (secure)
| AP TZC |
0xff000000 +--------------+
: :
0x82100000 |--------------|
| HW_CONFIG |
0x82000000 |--------------| (non-secure)
| |
0x80000000 +--------------+
Trusted DRAM
0x08000000 +--------------+
| HW_CONFIG |
0x07f00000 |--------------|
: :
| BL32 |
0x06000000 +--------------+
Trusted SRAM
0x04040000 +--------------+ loaded by BL2 +----------------+
| BL1 (rw) | <<<<<<<<<<<<< | |
|--------------| <<<<<<<<<<<<< | BL31 NOBITS |
| BL2 | <<<<<<<<<<<<< | |
|--------------| <<<<<<<<<<<<< |----------------|
| | <<<<<<<<<<<<< | BL31 PROGBITS |
| | +----------------+
0x04003000 +--------------+
| CONFIG |
0x04001000 +--------------+
| Shared |
0x04000000 +--------------+
Trusted ROM
0x04000000 +--------------+
| BL1 (ro) |
0x00000000 +--------------+
FVP with TSP in TZC-Secured DRAM with firmware configs :
DRAM
0xffffffff +----------+
| EL3 TZC |
0xffe00000 |----------| (secure)
| AP TZC |
| (BL32) |
0xff000000 +----------+
| |
0x82100000 |----------|
|HW_CONFIG |
0x82000000 |----------| (non-secure)
| |
0x80000000 +----------+
Trusted DRAM
0x08000000 +----------+
|HW_CONFIG |
0x7f000000 |----------|
: :
| |
0x06000000 +----------+
Trusted SRAM
0x04040000 +----------+ loaded by BL2 +----------------+
| BL1 (rw) | <<<<<<<<<<<<< | |
|----------| <<<<<<<<<<<<< | BL31 NOBITS |
| BL2 | <<<<<<<<<<<<< | |
|----------| <<<<<<<<<<<<< |----------------|
| | <<<<<<<<<<<<< | BL31 PROGBITS |
| | +----------------+
0x04003000 +----------+
| CONFIG |
0x04001000 +----------+
| Shared |
0x04000000 +----------+
Trusted ROM
0x04000000 +----------+
| BL1 (ro) |
0x00000000 +----------+
Juno with BL32 in Trusted SRAM :
DRAM
0xFFFFFFFF +----------+
| SCP TZC |
0xFFE00000 |----------|
| EL3 TZC |
0xFFC00000 |----------| (secure)
| AP TZC |
0xFF000000 +----------+
| |
: : (non-secure)
| |
0x80000000 +----------+
Flash0
0x0C000000 +----------+
: :
0x0BED0000 |----------|
| BL1 (ro) |
0x0BEC0000 |----------|
: :
0x08000000 +----------+ BL31 is loaded
after SCP_BL2 has
Trusted SRAM been sent to SCP
0x04040000 +----------+ loaded by BL2 +----------------+
| BL1 (rw) | <<<<<<<<<<<<< | |
|----------| <<<<<<<<<<<<< | BL31 NOBITS |
| BL2 | <<<<<<<<<<<<< | |
|----------| <<<<<<<<<<<<< |----------------|
| SCP_BL2 | <<<<<<<<<<<<< | BL31 PROGBITS |
| | <<<<<<<<<<<<< |----------------|
| | <<<<<<<<<<<<< | BL32 |
| | +----------------+
| |
0x04001000 +----------+
| MHU |
0x04000000 +----------+
Juno with BL32 in TZC-secured DRAM :
DRAM
0xFFFFFFFF +----------+
| SCP TZC |
0xFFE00000 |----------|
| EL3 TZC |
0xFFC00000 |----------| (secure)
| AP TZC |
| (BL32) |
0xFF000000 +----------+
| |
: : (non-secure)
| |
0x80000000 +----------+
Flash0
0x0C000000 +----------+
: :
0x0BED0000 |----------|
| BL1 (ro) |
0x0BEC0000 |----------|
: :
0x08000000 +----------+ BL31 is loaded
after SCP_BL2 has
Trusted SRAM been sent to SCP
0x04040000 +----------+ loaded by BL2 +----------------+
| BL1 (rw) | <<<<<<<<<<<<< | |
|----------| <<<<<<<<<<<<< | BL31 NOBITS |
| BL2 | <<<<<<<<<<<<< | |
|----------| <<<<<<<<<<<<< |----------------|
| SCP_BL2 | <<<<<<<<<<<<< | BL31 PROGBITS |
| | +----------------+
0x04001000 +----------+
| MHU |
0x04000000 +----------+
5.4.13. Firmware Image Package (FIP)
Using a Firmware Image Package (FIP) allows for packing bootloader images (and potentially other payloads) into a single archive that can be loaded by TF-A from non-volatile platform storage. A driver to load images from a FIP has been added to the storage layer and allows a package to be read from supported platform storage. A tool to create Firmware Image Packages is also provided and described below.
5.4.13.1. Firmware Image Package layout
The FIP layout consists of a table of contents (ToC) followed by payload data. The ToC itself has a header followed by one or more table entries. The ToC is terminated by an end marker entry, and since the size of the ToC is 0 bytes, the offset equals the total size of the FIP file. All ToC entries describe some payload data that has been appended to the end of the binary package. With the information provided in the ToC entry the corresponding payload data can be retrieved.
------------------
| ToC Header |
|----------------|
| ToC Entry 0 |
|----------------|
| ToC Entry 1 |
|----------------|
| ToC End Marker |
|----------------|
| |
| Data 0 |
| |
|----------------|
| |
| Data 1 |
| |
------------------
The ToC header and entry formats are described in the header file
include/tools_share/firmware_image_package.h. This file is used by both the
tool and TF-A.
The ToC header has the following fields:
`name`: The name of the ToC. This is currently used to validate the header.
`serial_number`: A non-zero number provided by the creation tool
`flags`: Flags associated with this data.
Bits 0-31: Reserved
Bits 32-47: Platform defined
Bits 48-63: Reserved
A ToC entry has the following fields:
`uuid`: All files are referred to by a pre-defined Universally Unique
IDentifier [UUID] . The UUIDs are defined in
`include/tools_share/firmware_image_package.h`. The platform translates
the requested image name into the corresponding UUID when accessing the
package.
`offset_address`: The offset address at which the corresponding payload data
can be found. The offset is calculated from the ToC base address.
`size`: The size of the corresponding payload data in bytes.
`flags`: Flags associated with this entry. None are yet defined.
5.4.13.2. Firmware Image Package creation tool
The FIP creation tool can be used to pack specified images into a binary package that can be loaded by TF-A from platform storage. The tool currently only supports packing bootloader images. Additional image definitions can be added to the tool as required.
The tool can be found in tools/fiptool.
5.4.13.3. Loading from a Firmware Image Package (FIP)
The Firmware Image Package (FIP) driver can load images from a binary package on non-volatile platform storage. For the Arm development platforms, this is currently NOR FLASH.
Bootloader images are loaded according to the platform policy as specified by
the function plat_get_image_source(). For the Arm development platforms, this
means the platform will attempt to load images from a Firmware Image Package
located at the start of NOR FLASH0.
The Arm development platforms’ policy is to only allow loading of a known set of images. The platform policy can be modified to allow additional images.
5.4.14. Use of coherent memory in TF-A
There might be loss of coherency when physical memory with mismatched shareability, cacheability and memory attributes is accessed by multiple CPUs (refer to section B2.9 of Arm ARM for more details). This possibility occurs in TF-A during power up/down sequences when coherency, MMU and caches are turned on/off incrementally.
TF-A defines coherent memory as a region of memory with Device nGnRE attributes in the translation tables. The translation granule size in TF-A is 4KB. This is the smallest possible size of the coherent memory region.
By default, all data structures which are susceptible to accesses with mismatched attributes from various CPUs are allocated in a coherent memory region (refer to section 2.1 of Porting Guide). The coherent memory region accesses are Outer Shareable, non-cacheable and they can be accessed with the Device nGnRE attributes when the MMU is turned on. Hence, at the expense of at least an extra page of memory, TF-A is able to work around coherency issues due to mismatched memory attributes.
The alternative to the above approach is to allocate the susceptible data structures in Normal WriteBack WriteAllocate Inner shareable memory. This approach requires the data structures to be designed so that it is possible to work around the issue of mismatched memory attributes by performing software cache maintenance on them.
5.4.14.1. Disabling the use of coherent memory in TF-A
It might be desirable to avoid the cost of allocating coherent memory on
platforms which are memory constrained. TF-A enables inclusion of coherent
memory in firmware images through the build flag USE_COHERENT_MEM.
This flag is enabled by default. It can be disabled to choose the second
approach described above.
The below sections analyze the data structures allocated in the coherent memory region and the changes required to allocate them in normal memory.
5.4.14.2. Coherent memory usage in PSCI implementation
The psci_non_cpu_pd_nodes data structure stores the platform’s power domain
tree information for state management of power domains. By default, this data
structure is allocated in the coherent memory region in TF-A because it can be
accessed by multiple CPUs, either with caches enabled or disabled.
typedef struct non_cpu_pwr_domain_node {
/*
* Index of the first CPU power domain node level 0 which has this node
* as its parent.
*/
unsigned int cpu_start_idx;
/*
* Number of CPU power domains which are siblings of the domain indexed
* by 'cpu_start_idx' i.e. all the domains in the range 'cpu_start_idx
* -> cpu_start_idx + ncpus' have this node as their parent.
*/
unsigned int ncpus;
/*
* Index of the parent power domain node.
*/
unsigned int parent_node;
plat_local_state_t local_state;
unsigned char level;
/* For indexing the psci_lock array*/
unsigned char lock_index;
} non_cpu_pd_node_t;
In order to move this data structure to normal memory, the use of each of its
fields must be analyzed. Fields like cpu_start_idx, ncpus, parent_node
level and lock_index are only written once during cold boot. Hence removing
them from coherent memory involves only doing a clean and invalidate of the
cache lines after these fields are written.
The field local_state can be concurrently accessed by multiple CPUs in
different cache states. A Lamport’s Bakery lock psci_locks is used to ensure
mutual exclusion to this field and a clean and invalidate is needed after it
is written.
5.4.14.3. Bakery lock data
The bakery lock data structure bakery_lock_t is allocated in coherent memory
and is accessed by multiple CPUs with mismatched attributes. bakery_lock_t is
defined as follows:
typedef struct bakery_lock {
/*
* The lock_data is a bit-field of 2 members:
* Bit[0] : choosing. This field is set when the CPU is
* choosing its bakery number.
* Bits[1 - 15] : number. This is the bakery number allocated.
*/
volatile uint16_t lock_data[BAKERY_LOCK_MAX_CPUS];
} bakery_lock_t;
It is a characteristic of Lamport’s Bakery algorithm that the volatile per-CPU fields can be read by all CPUs but only written to by the owning CPU.
Depending upon the data cache line size, the per-CPU fields of the
bakery_lock_t structure for multiple CPUs may exist on a single cache line.
These per-CPU fields can be read and written during lock contention by multiple
CPUs with mismatched memory attributes. Since these fields are a part of the
lock implementation, they do not have access to any other locking primitive to
safeguard against the resulting coherency issues. As a result, simple software
cache maintenance is not enough to allocate them in coherent memory. Consider
the following example.
CPU0 updates its per-CPU field with data cache enabled. This write updates a
local cache line which contains a copy of the fields for other CPUs as well. Now
CPU1 updates its per-CPU field of the bakery_lock_t structure with data cache
disabled. CPU1 then issues a DCIVAC operation to invalidate any stale copies of
its field in any other cache line in the system. This operation will invalidate
the update made by CPU0 as well.
To use bakery locks when USE_COHERENT_MEM is disabled, the lock data structure
has been redesigned. The changes utilise the characteristic of Lamport’s Bakery
algorithm mentioned earlier. The bakery_lock structure only allocates the memory
for a single CPU. The macro DEFINE_BAKERY_LOCK allocates all the bakery locks
needed for a CPU into a section .bakery_lock. The linker allocates the memory
for other cores by using the total size allocated for the bakery_lock section
and multiplying it with (PLATFORM_CORE_COUNT - 1). This enables software to
perform software cache maintenance on the lock data structure without running
into coherency issues associated with mismatched attributes.
The bakery lock data structure bakery_info_t is defined for use when
USE_COHERENT_MEM is disabled as follows:
typedef struct bakery_info {
/*
* The lock_data is a bit-field of 2 members:
* Bit[0] : choosing. This field is set when the CPU is
* choosing its bakery number.
* Bits[1 - 15] : number. This is the bakery number allocated.
*/
volatile uint16_t lock_data;
} bakery_info_t;
The bakery_info_t represents a single per-CPU field of one lock and
the combination of corresponding bakery_info_t structures for all CPUs in the
system represents the complete bakery lock. The view in memory for a system
with n bakery locks are:
.bakery_lock section start
|----------------|
| `bakery_info_t`| <-- Lock_0 per-CPU field
| Lock_0 | for CPU0
|----------------|
| `bakery_info_t`| <-- Lock_1 per-CPU field
| Lock_1 | for CPU0
|----------------|
| .... |
|----------------|
| `bakery_info_t`| <-- Lock_N per-CPU field
| Lock_N | for CPU0
------------------
| XXXXX |
| Padding to |
| next Cache WB | <--- Calculate PERCPU_BAKERY_LOCK_SIZE, allocate
| Granule | continuous memory for remaining CPUs.
------------------
| `bakery_info_t`| <-- Lock_0 per-CPU field
| Lock_0 | for CPU1
|----------------|
| `bakery_info_t`| <-- Lock_1 per-CPU field
| Lock_1 | for CPU1
|----------------|
| .... |
|----------------|
| `bakery_info_t`| <-- Lock_N per-CPU field
| Lock_N | for CPU1
------------------
| XXXXX |
| Padding to |
| next Cache WB |
| Granule |
------------------
Consider a system of 2 CPUs with ‘N’ bakery locks as shown above. For an
operation on Lock_N, the corresponding bakery_info_t in both CPU0 and CPU1
.bakery_lock section need to be fetched and appropriate cache operations need
to be performed for each access.
On Arm Platforms, bakery locks are used in psci (psci_locks) and power controller
driver (arm_lock).
5.4.14.4. Non Functional Impact of removing coherent memory
Removal of the coherent memory region leads to the additional software overhead of performing cache maintenance for the affected data structures. However, since the memory where the data structures are allocated is cacheable, the overhead is mostly mitigated by an increase in performance.
There is however a performance impact for bakery locks, due to:
Additional cache maintenance operations, and
Multiple cache line reads for each lock operation, since the bakery locks for each CPU are distributed across different cache lines.
The implementation has been optimized to minimize this additional overhead. Measurements indicate that when bakery locks are allocated in Normal memory, the minimum latency of acquiring a lock is on an average 3-4 micro seconds whereas in Device memory the same is 2 micro seconds. The measurements were done on the Juno Arm development platform.
As mentioned earlier, almost a page of memory can be saved by disabling
USE_COHERENT_MEM. Each platform needs to consider these trade-offs to decide
whether coherent memory should be used. If a platform disables
USE_COHERENT_MEM and needs to use bakery locks in the porting layer, it can
optionally define macro PLAT_PERCPU_BAKERY_LOCK_SIZE (see the
Porting Guide). Refer to the reference platform code for examples.
5.4.15. Isolating code and read-only data on separate memory pages
In the Armv8-A VMSA, translation table entries include fields that define the properties of the target memory region, such as its access permissions. The smallest unit of memory that can be addressed by a translation table entry is a memory page. Therefore, if software needs to set different permissions on two memory regions then it needs to map them using different memory pages.
The default memory layout for each BL image is as follows:
| ... |
+-------------------+
| Read-write data |
+-------------------+ Page boundary
| <Padding> |
+-------------------+
| Exception vectors |
+-------------------+ 2 KB boundary
| <Padding> |
+-------------------+
| Read-only data |
+-------------------+
| Code |
+-------------------+ BLx_BASE
Note
The 2KB alignment for the exception vectors is an architectural requirement.
The read-write data start on a new memory page so that they can be mapped with read-write permissions, whereas the code and read-only data below are configured as read-only.
However, the read-only data are not aligned on a page boundary. They are contiguous to the code. Therefore, the end of the code section and the beginning of the read-only data one might share a memory page. This forces both to be mapped with the same memory attributes. As the code needs to be executable, this means that the read-only data stored on the same memory page as the code are executable as well. This could potentially be exploited as part of a security attack.
TF provides the build flag SEPARATE_CODE_AND_RODATA to isolate the code and
read-only data on separate memory pages. This in turn allows independent control
of the access permissions for the code and read-only data. In this case,
platform code gets a finer-grained view of the image layout and can
appropriately map the code region as executable and the read-only data as
execute-never.
This has an impact on memory footprint, as padding bytes need to be introduced between the code and read-only data to ensure the segregation of the two. To limit the memory cost, this flag also changes the memory layout such that the code and exception vectors are now contiguous, like so:
| ... |
+-------------------+
| Read-write data |
+-------------------+ Page boundary
| <Padding> |
+-------------------+
| Read-only data |
+-------------------+ Page boundary
| <Padding> |
+-------------------+
| Exception vectors |
+-------------------+ 2 KB boundary
| <Padding> |
+-------------------+
| Code |
+-------------------+ BLx_BASE
With this more condensed memory layout, the separation of read-only data will add zero or one page to the memory footprint of each BL image. Each platform should consider the trade-off between memory footprint and security.
This build flag is disabled by default, minimising memory footprint. On Arm platforms, it is enabled.
5.4.16. Publish and Subscribe Framework
The Publish and Subscribe Framework allows EL3 components to define and publish events, to which other EL3 components can subscribe.
The following macros are provided by the framework:
REGISTER_PUBSUB_EVENT(event): Defines an event, and takes one argument, the event name, which must be a valid C identifier. All calls toREGISTER_PUBSUB_EVENTmacro must be placed in the filepubsub_events.h.PUBLISH_EVENT_ARG(event, arg): Publishes a defined event, by iterating subscribed handlers and calling them in turn. The handlers will be passed the parameterarg. The expected use-case is to broadcast an event.PUBLISH_EVENT(event): LikePUBLISH_EVENT_ARG, except that the valueNULLis passed to subscribed handlers.SUBSCRIBE_TO_EVENT(event, handler): Registers thehandlerto subscribe toevent. The handler will be executed whenever theeventis published.for_each_subscriber(event, subscriber): Iterates through all handlers subscribed forevent.subscribermust be a local variable of typepubsub_cb_t *, and will point to each subscribed handler in turn during iteration. This macro can be used for those patterns that none of thePUBLISH_EVENT_*()macros cover.
Publishing an event that wasn’t defined using REGISTER_PUBSUB_EVENT will
result in build error. Subscribing to an undefined event however won’t.
Subscribed handlers must be of type pubsub_cb_t, with following function
signature:
typedef void* (*pubsub_cb_t)(const void *arg);
There may be arbitrary number of handlers registered to the same event. The order in which subscribed handlers are notified when that event is published is not defined. Subscribed handlers may be executed in any order; handlers should not assume any relative ordering amongst them.
Publishing an event on a PE will result in subscribed handlers executing on that PE only; it won’t cause handlers to execute on a different PE.
Note that publishing an event on a PE blocks until all the subscribed handlers finish executing on the PE.
TF-A generic code publishes and subscribes to some events within. Platform ports are discouraged from subscribing to them. These events may be withdrawn, renamed, or have their semantics altered in the future. Platforms may however register, publish, and subscribe to platform-specific events.
5.4.16.1. Publish and Subscribe Example
A publisher that wants to publish event foo would:
Define the event
fooin thepubsub_events.h.REGISTER_PUBSUB_EVENT(foo);
Depending on the nature of event, use one of
PUBLISH_EVENT_*()macros to publish the event at the appropriate path and time of execution.
A subscriber that wants to subscribe to event foo published above would
implement:
void *foo_handler(const void *arg)
{
void *result;
/* Do handling ... */
return result;
}
SUBSCRIBE_TO_EVENT(foo, foo_handler);
5.4.16.2. Reclaiming the BL31 initialization code
A significant amount of the code used for the initialization of BL31 is never needed again after boot time. In order to reduce the runtime memory footprint, the memory used for this code can be reclaimed after initialization has finished and be used for runtime data.
The build option RECLAIM_INIT_CODE can be set to mark this boot time code
with a .text.init.* attribute which can be filtered and placed suitably
within the BL image for later reclamation by the platform. The platform can
specify the filter and the memory region for this init section in BL31 via the
plat.ld.S linker script. For example, on the FVP, this section is placed
overlapping the secondary CPU stacks so that after the cold boot is done, this
memory can be reclaimed for the stacks. The init memory section is initially
mapped with RO, EXECUTE attributes. After BL31 initialization has
completed, the FVP changes the attributes of this section to RW,
EXECUTE_NEVER allowing it to be used for runtime data. The memory attributes
are changed within the bl31_plat_runtime_setup platform hook. The init
section section can be reclaimed for any data which is accessed after cold
boot initialization and it is upto the platform to make the decision.
Please note that this will disable inlining for any functions with the __init attribute.
5.4.17. Performance Measurement Framework
The Performance Measurement Framework (PMF) facilitates collection of timestamps by registered services and provides interfaces to retrieve them from within TF-A. A platform can choose to expose appropriate SMCs to retrieve these collected timestamps.
By default, the global physical counter is used for the timestamp
value and is read via CNTPCT_EL0. The framework allows to retrieve
timestamps captured by other CPUs.
5.4.17.1. Timestamp identifier format
A PMF timestamp is uniquely identified across the system via the
timestamp ID or tid. The tid is composed as follows:
Bits 0-7: The local timestamp identifier.
Bits 8-9: Reserved.
Bits 10-15: The service identifier.
Bits 16-31: Reserved.
The service identifier. Each PMF service is identified by a service name and a service identifier. Both the service name and identifier are unique within the system as a whole.
The local timestamp identifier. This identifier is unique within a given service.
5.4.17.2. Registering a PMF service
To register a PMF service, the PMF_REGISTER_SERVICE() macro from pmf.h
is used. The arguments required are the service name, the service ID,
the total number of local timestamps to be captured and a set of flags.
The flags field can be specified as a bitwise-OR of the following values:
PMF_STORE_ENABLE: The timestamp is stored in memory for later retrieval.
PMF_DUMP_ENABLE: The timestamp is dumped on the serial console.
The PMF_REGISTER_SERVICE() reserves memory to store captured
timestamps in a PMF specific linker section at build time.
Additionally, it defines necessary functions to capture and
retrieve a particular timestamp for the given service at runtime.
The macro PMF_REGISTER_SERVICE() only enables capturing PMF timestamps
from within TF-A. In order to retrieve timestamps from outside of TF-A, the
PMF_REGISTER_SERVICE_SMC() macro must be used instead. This macro
accepts the same set of arguments as the PMF_REGISTER_SERVICE()
macro but additionally supports retrieving timestamps using SMCs.
5.4.17.3. Capturing a timestamp
PMF timestamps are stored in a per-service timestamp region. On a system with multiple CPUs, each timestamp is captured and stored in a per-CPU cache line aligned memory region.
Having registered the service, the PMF_CAPTURE_TIMESTAMP() macro can be
used to capture a timestamp at the location where it is used. The macro
takes the service name, a local timestamp identifier and a flag as arguments.
The flags field argument can be zero, or PMF_CACHE_MAINT which
instructs PMF to do cache maintenance following the capture. Cache
maintenance is required if any of the service’s timestamps are captured
with data cache disabled.
To capture a timestamp in assembly code, the caller should use
pmf_calc_timestamp_addr macro (defined in pmf_asm_macros.S) to
calculate the address of where the timestamp would be stored. The
caller should then read CNTPCT_EL0 register to obtain the timestamp
and store it at the determined address for later retrieval.
5.4.17.4. Retrieving a timestamp
From within TF-A, timestamps for individual CPUs can be retrieved using either
PMF_GET_TIMESTAMP_BY_MPIDR() or PMF_GET_TIMESTAMP_BY_INDEX() macros.
These macros accept the CPU’s MPIDR value, or its ordinal position
respectively.
From outside TF-A, timestamps for individual CPUs can be retrieved by calling
into pmf_smc_handler().
Interface : pmf_smc_handler()
Argument : unsigned int smc_fid, u_register_t x1,
u_register_t x2, u_register_t x3,
u_register_t x4, void *cookie,
void *handle, u_register_t flags
Return : uintptr_t
smc_fid: Holds the SMC identifier which is either `PMF_SMC_GET_TIMESTAMP_32`
when the caller of the SMC is running in AArch32 mode
or `PMF_SMC_GET_TIMESTAMP_64` when the caller is running in AArch64 mode.
x1: Timestamp identifier.
x2: The `mpidr` of the CPU for which the timestamp has to be retrieved.
This can be the `mpidr` of a different core to the one initiating
the SMC. In that case, service specific cache maintenance may be
required to ensure the updated copy of the timestamp is returned.
x3: A flags value that is either 0 or `PMF_CACHE_MAINT`. If
`PMF_CACHE_MAINT` is passed, then the PMF code will perform a
cache invalidate before reading the timestamp. This ensures
an updated copy is returned.
The remaining arguments, x4, cookie, handle and flags are unused
in this implementation.
5.4.17.5. PMF code structure
pmf_main.cconsists of core functions that implement service registration, initialization, storing, dumping and retrieving timestamps.pmf_smc.ccontains the SMC handling for registered PMF services.pmf.hcontains the public interface to Performance Measurement Framework.pmf_asm_macros.Sconsists of macros to facilitate capturing timestamps in assembly code.pmf_helpers.his an internal header used bypmf.h.
5.4.18. Armv8-A Architecture Extensions
TF-A makes use of Armv8-A Architecture Extensions where applicable. This section lists the usage of Architecture Extensions, and build flags controlling them.
5.4.18.1. Build options
ARM_ARCH_MAJOR and ARM_ARCH_MINOR
These build options serve dual purpose
Determine the architecture extension support in TF-A build: All the mandatory architectural features up to
ARM_ARCH_MAJOR.ARM_ARCH_MINORare included and unconditionally enabled by TF-A build system.ARM_ARCH_MAJORandARM_ARCH_MINORare passed to a march.mk build utility this will try to come up with an appropriate -march value to be passed to compiler by probing the compiler and checking what’s supported by the compiler and what’s best that can be used. But if platform provides aMARCH_DIRECTIVEthen it will used directly and compiler probing will be skipped. UseARM_ARCH_FEATUREto provide a list of optional features that can be relied upon.
The build system requires that the platform provides a valid numeric value based on CPU architecture extension, otherwise it defaults to base Armv8.0-A architecture. Subsequent Arm Architecture versions also support extensions which were introduced in previous versions.
See also
For details on the Architecture Extension and available features, please refer to the respective Architecture Extension Supplement.
5.4.18.2. Armv8.1-A
This Architecture Extension is targeted when ARM_ARCH_MAJOR >= 8, or when
ARM_ARCH_MAJOR == 8 and ARM_ARCH_MINOR >= 1.
By default, a load-/store-exclusive instruction pair is used to implement spinlocks. The
USE_SPINLOCK_CASbuild option when set to 1 selects the spinlock implementation using the ARMv8.1-LSE Compare and Swap instruction. Notice this instruction is only available in AArch64 execution state, so the option is only available to AArch64 builds.
5.4.18.3. Armv8.2-A
The presence of ARMv8.2-TTCNP is detected at runtime. When it is present, the Common not Private (TTBRn_ELx.CnP) bit is enabled to indicate that multiple Processing Elements in the same Inner Shareable domain use the same translation table entries for a given stage of translation for a particular translation regime.
5.4.18.4. Armv8.3-A
Pointer authentication features of Armv8.3-A are unconditionally enabled in the Non-secure world so that lower ELs are allowed to use them without causing a trap to EL3.
In order to enable the Secure world to use it,
CTX_INCLUDE_PAUTH_REGSmust be set to 1. This will add all pointer authentication system registers to the context that is saved when doing a world switch.The TF-A itself has support for pointer authentication at runtime that can be enabled by setting
BRANCH_PROTECTIONoption to non-zero andCTX_INCLUDE_PAUTH_REGSto 1. This enables pointer authentication in BL1, BL2, BL31, and the TSP if it is used.Note that Pointer Authentication is enabled for Non-secure world irrespective of the value of these build flags if the CPU supports it.
If
ARM_ARCH_MAJOR == 8andARM_ARCH_MINOR >= 3the code footprint of enabling PAuth is lower because the compiler will use the optimized PAuth instructions rather than the backwards-compatible ones.
5.4.18.5. Armv8.5-A
Branch Target Identification feature is selected by
BRANCH_PROTECTIONoption set to 1. This option defaults to 0.Memory Tagging Extension feature has few variants but not all of them require enablement from EL3 to be used at lower EL. e.g. Memory tagging only at EL0(MTE) does not require EL3 configuration however memory tagging at EL2/EL1 (MTE2) does require EL3 enablement and we need to set this option
ENABLE_FEAT_MTE2to 1. This option defaults to 0.
5.4.18.6. Armv7-A
This Architecture Extension is targeted when ARM_ARCH_MAJOR == 7.
There are several Armv7-A extensions available. Obviously the TrustZone extension is mandatory to support the TF-A bootloader and runtime services.
Platform implementing an Armv7-A system can to define from its target
Cortex-A architecture through ARM_CORTEX_A<X> = yes in their
platform.mk script. For example ARM_CORTEX_A15=yes for a
Cortex-A15 target.
Platform can also set ARM_WITH_NEON=yes to enable neon support.
Note that using neon at runtime has constraints on non secure world context.
TF-A does not yet provide VFP context management.
Directive ARM_CORTEX_A<x> and ARM_WITH_NEON are used to set
the toolchain target architecture directive.
Platform may choose to not define straight the toolchain target architecture
directive by defining MARCH_DIRECTIVE.
I.e:
MARCH_DIRECTIVE := -march=armv7-a
5.4.19. Code Structure
TF-A code is logically divided between the three boot loader stages mentioned in the previous sections. The code is also divided into the following categories (present as directories in the source code):
Platform specific. Choice of architecture specific code depends upon the platform.
Common code. This is platform and architecture agnostic code.
Library code. This code comprises of functionality commonly used by all other code. The PSCI implementation and other EL3 runtime frameworks reside as Library components.
Stage specific. Code specific to a boot stage.
Drivers.
Services. EL3 runtime services (eg: SPD). Specific SPD services reside in the
services/spddirectory (e.g.services/spd/tspd).
Each boot loader stage uses code from one or more of the above mentioned categories. Based upon the above, the code layout looks like this:
Directory Used by BL1? Used by BL2? Used by BL31?
bl1 Yes No No
bl2 No Yes No
bl31 No No Yes
plat Yes Yes Yes
drivers Yes No Yes
common Yes Yes Yes
lib Yes Yes Yes
services No No Yes
The build system provides a non configurable build option IMAGE_BLx for each boot loader stage (where x = BL stage). e.g. for BL1 , IMAGE_BL1 will be defined by the build system. This enables TF-A to compile certain code only for specific boot loader stages
All assembler files have the .S extension. The linker source files for each
boot stage have the extension .ld.S. These are processed by GCC to create the
linker scripts which have the extension .ld.
FDTs provide a description of the hardware platform and are used by the Linux
kernel at boot time. These can be found in the fdts directory.
References
Copyright (c) 2013-2026, Arm Limited and Contributors. All rights reserved.