10.1. TF-A CMake buildsystem
- Author:
Balint Dobszay
- Organization:
Arm Limited
- Contact:
Balint Dobszay <balint.dobszay@arm.com>
- Status:
Accepted
10.1.1. Abstract
This document presents a proposal for a new buildsystem for TF-A using CMake, and as part of this a reusable CMake framework for embedded projects.
10.1.2. Introduction
The current Makefile based buildsystem of TF-A has become complicated and hard to maintain, there is a need for a new, more flexible solution. The proposal is to use CMake language for the new buildsystem. The main reasons of this decision are the following:
It is a well-established, mature tool, widely accepted by open-source projects.
TF-M is already using CMake, reducing fragmentation for tf.org projects can be beneficial.
CMake has various advantages over Make, e.g.:
Host and target system agnostic project.
CMake project is scalable, supports project modularization.
Supports software integration.
Out-of-the-box support for integration with several tools (e.g. project generation for various IDEs, integration with cppcheck, etc).
Of course there are drawbacks too:
Language is problematic (e.g. variable scope).
Not embedded approach.
To overcome these and other problems, we need to create workarounds for some tasks, wrap CMake functions, etc. Since this functionality can be useful in other embedded projects too, it is beneficial to collect the new code into a reusable framework and store this in a separate repository. The following diagram provides an overview of the framework structure:
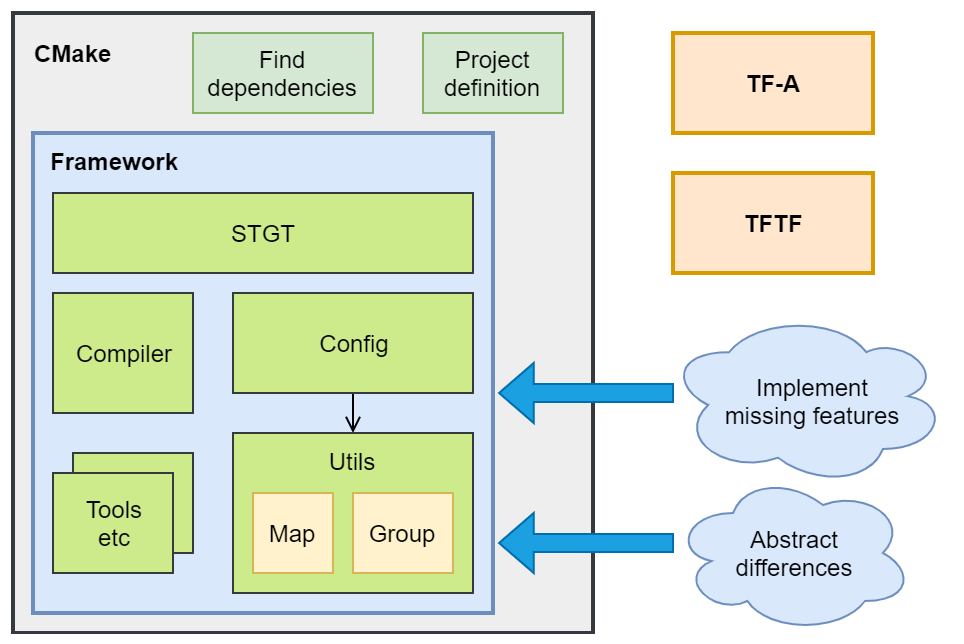
10.1.3. Main features
10.1.3.1. Structured configuration description
In the current Makefile system the build configuration description, validation, processing, and the target creation, source file description are mixed and spread across several files. One of the goals of the framework is to organize this.
The framework provides a solution to describe the input build parameters, flags, macros, etc. in a structured way. It contains two utilities for this purpose:
Map: simple key-value pair implementation.
Group: collection of related maps.
The related parameters shall be packed into a group (or “setting group”). The setting groups shall be defined and filled with content in config files. Currently the config files are created and edited manually, but later a configuration management tool (e.g. Kconfig) shall be used to generate these files. Therefore, the framework does not contain parameter validation and conflict checking, these shall be handled by the configuration tool.
10.1.3.2. Target description
The framework provides an API called STGT (‘simple target’) to describe the targets, i.e. what is the build output, what source files are used, what libraries are linked, etc. The API wraps the CMake target functions, and also extends the built-in functionality, it can use the setting groups described in the previous section. A group can be applied onto a target, i.e. a collection of macros, flags, etc. can be applied onto the given output executable/library. This provides a more granular way than the current Makefile system where most of these are global and applied onto each target.
10.1.3.3. Compiler abstraction
Apart from the built-in CMake usage of the compiler, there are some common tasks that CMake does not solve (e.g. preprocessing a file). For these tasks the framework uses wrapper functions instead of direct calls to the compiler. This way it is not tied to one specific compiler.
10.1.3.4. External tools
In the TF-A buildsystem some external tools are used, e.g. fiptool for image generation or dtc for device tree compilation. These tools have to be found and/or built by the framework. For this, the CMake find_package functionality is used, any other necessary tools can be added later.
10.1.4. Workflow
The following diagram demonstrates the development workflow using the framework:
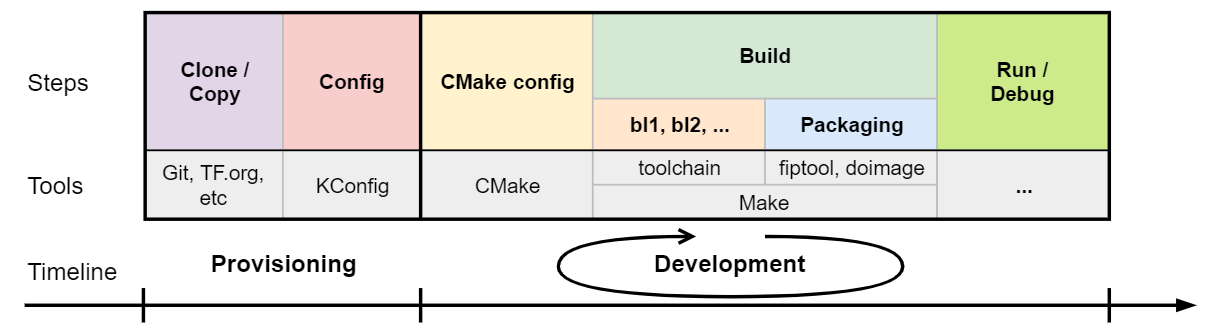
The process can be split into two main phases:
In the provisioning phase, first we have to obtain the necessary resources, i.e. clone the code repository and other dependencies. Next we have to do the configuration, preferably using a config tool like KConfig.
In the development phase first we run CMake, which will generate the buildsystem using the selected generator backend (currently only the Makefile generator is supported). After this we run the selected build tool which in turn calls the compiler, linker, packaging tool, etc. Finally we can run and debug the output executables.
Usually during development only the steps in this second phase have to be repeated, while the provisioning phase needs to be done only once (or rarely).
10.1.5. Example
This is a short example for the basic framework usage.
First, we create a setting group called mem_conf and fill it with several parameters. It is worth noting the difference between CONFIG and DEFINE types: the former is only a CMake domain option, the latter is only a C language macro.
Next, we create a target called fw1 and add the mem_conf setting group to it. This means that all source and header files used by the target will have all the parameters declared in the setting group. Then we set the target type to executable, and add some source files. Since the target has the parameters from the settings group, we can use it for conditionally adding source files. E.g. dram_controller.c will only be added if MEM_TYPE equals dram.
group_new(NAME mem_conf)
group_add(NAME mem_conf TYPE DEFINE KEY MEM_SIZE VAL 1024)
group_add(NAME mem_conf TYPE CONFIG DEFINE KEY MEM_TYPE VAL dram)
group_add(NAME mem_conf TYPE CFLAG KEY -Os)
stgt_create(NAME fw1)
stgt_add_setting(NAME fw1 GROUPS mem_conf)
stgt_set_target(NAME fw1 TYPE exe)
stgt_add_src(NAME fw1 SRC
${CMAKE_SOURCE_DIR}/main.c
)
stgt_add_src_cond(NAME fw1 KEY MEM_TYPE VAL dram SRC
${CMAKE_SOURCE_DIR}/dram_controller.c
)
Copyright (c) 2019-2024, Arm Limited and Contributors. All rights reserved.