4.12. Reliability, Availability, and Serviceability (RAS) Extensions
This document describes TF-A support for Arm Reliability, Availability, and Serviceability (RAS) extensions. RAS is a mandatory extension for Armv8.2 and later CPUs, and also an optional extension to the base Armv8.0 architecture.
For the description of Arm RAS extensions, Standard Error Records, and the precise definition of RAS terminology, please refer to the Arm Architecture Reference Manual and RAS Supplement. The rest of this document assumes familiarity with architecture and terminology.
IMPORTANT NOTE: TF-A implementation assumes that if RAS extension is present then FEAT_IESB is also implemented.
There are two philosophies for handling RAS errors from Non-secure world point of view.
4.12.1. Firmware First Handling (FFH)
4.12.1.1. Introduction
EA’s and Error interrupts corresponding to NS nodes are handled first in firmware
Errors signaled back to NS world via suitable mechanism
Kernel is prohibited from accessing the RAS error records directly
Firmware creates CPER records for kernel to navigate and process
Firmware signals error back to Kernel via SDEI
4.12.1.2. Overview
FFH works in conjunction with Exception Handling Framework. Exceptions resulting from errors in Non-secure world are routed to and handled in EL3. Said errors are Synchronous External Abort (SEA), Asynchronous External Abort (signalled as SErrors), Fault Handling and Error Recovery interrupts. RAS Framework in TF-A allows the platform to define an external abort handler and to register RAS nodes and interrupts. It also provides helpers for accessing Standard Error Records as introduced by the RAS extensions
4.12.2. Kernel First Handling (KFH)
4.12.2.1. Introduction
EA’s originating/attributed to NS world are handled first in NS and Kernel navigates the std error records directly.
KFH is the default handling mode if platform does not explicitly enable FFH mode.
KFH mode does not need any EL3 involvement except for the reflection of errors back to lower EL. This happens when there is an error (EA) in the system which is not yet signaled to PE while executing at lower EL. During entry into EL3 the errors (EA) are synchronized causing async EA to pend at EL3.
4.12.3. Error Syncronization at EL3 entry
During entry to EL3 from lower EL, if there is any pending async EAs they are either reflected back to lower EL (KFH) or handled in EL3 itself (FFH).
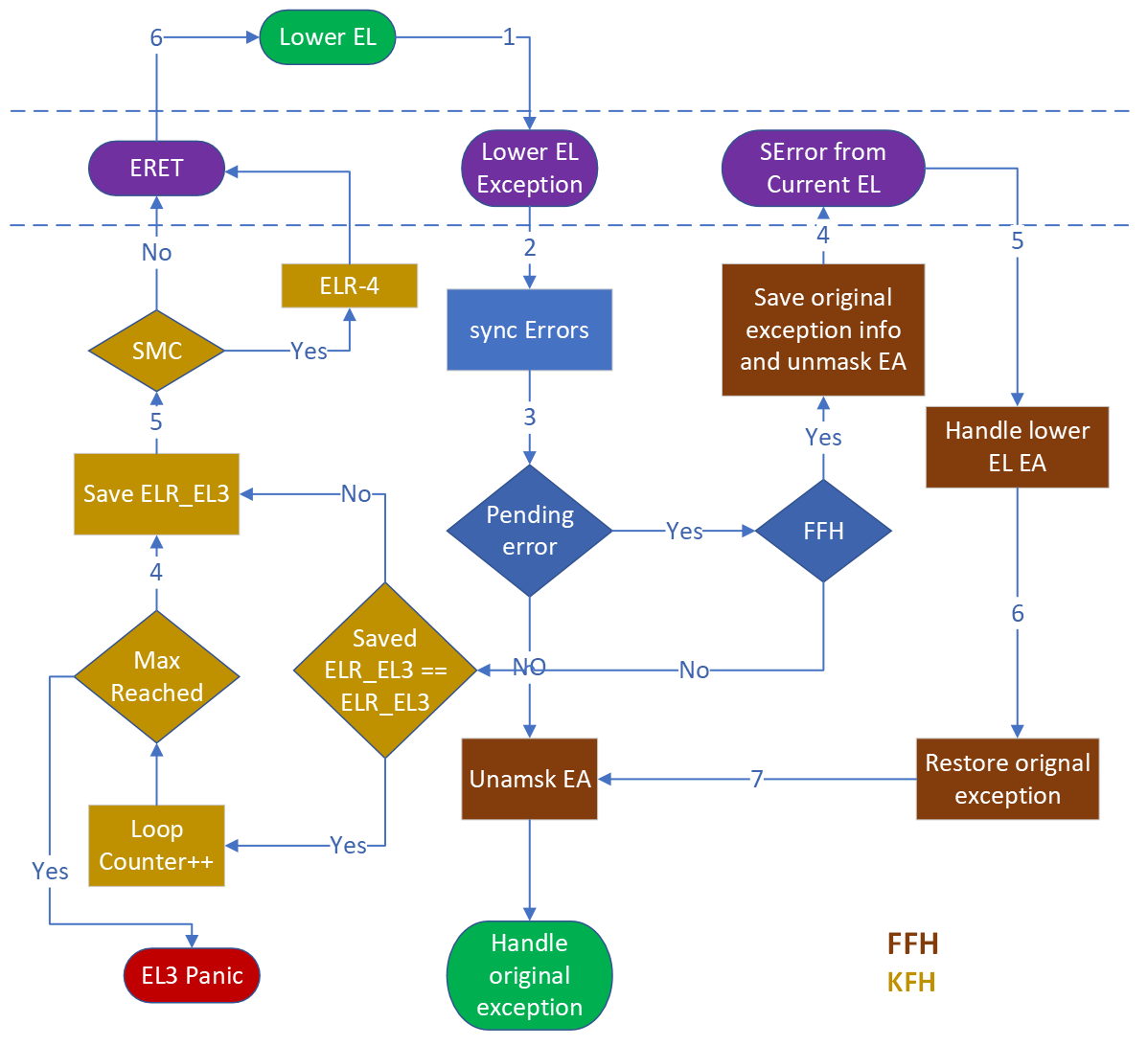
4.12.3.1. Limitation in KFH Mode
When handling asynchronous External Aborts (EAs) synchronized at EL3 entry in Kernel First Handling (KFH) mode, there is a limitation in the current implementation:
The handler reflects pending async EAs back to the lower EL if the EA routing model is KFH
However, if the asynchronous EA is masked at the target exception level, or if its priority relative to an EL3/secure interrupt is lower, repeated back-and-forth transitions between lower EL and EL3 can occur.
To prevent infinite cycling between EL3 and lower EL, a loop counter (CTX_NESTED_EA_FLAG) and
the previously saved ELR (CTX_SAVED_ELR_EL3) are used to detect this condition. If a loop is
detected, EL3 will trigger a panic (label check_loop_ctr) to indicate a problem.
4.12.3.2. Future Plan: Delegated SError Injection (FEAT_E3DSE)
In future revisions, this limitation can be mitigated by utilizing FEAT_E3DSE — the Delegated SError exception injection feature introduced for EL3.
FEAT_E3DSE provides a mechanism for EL3 to inject a virtual SError into lower exception levels. Once this capability is supported in TF-A, EL3 will be able to handle the original exception and then inject the delegated SError to the appropriate lower EL before returning, thereby eliminating the need for panic handling in this scenario.
This planned enhancement will improve robustness and correctness of asynchronous error handling in KFH mode.
4.12.4. TF-A build options
ENABLE_FEAT_RAS: Enable RAS extension feature at EL3.
HANDLE_EA_EL3_FIRST_NS: Required for FFH
RAS_TRAP_NS_ERR_REC_ACCESS: Trap Non-secure access of RAS error record registers.
RAS_EXTENSION: Deprecated macro, equivalent to ENABLE_FEAT_RAS and HANDLE_EA_EL3_FIRST_NS put together.
ENABLE_FEAT_AxERR: enables the use of FEAT_ANERR and FEAT_ADERR at EL3
RAS internal macros
FFH_SUPPORT: Gets enabled if HANDLE_EA_EL3_FIRST_NS is enabled.
RAS feature has dependency on some other TF-A build flags
EL3_EXCEPTION_HANDLING: Required for FFH
FAULT_INJECTION_SUPPORT: Required for testing RAS feature on fvp platform
4.12.5. TF-A Tests
RAS functionality is regularly tested in TF-A CI using RAS test group which has multiple configurations for testing lower EL External aborts.
All the tests are written in TF-A tests which runs as NS-EL2 payload.
FFH with RAS extension
Three Tests :
fvp-ras-ffh,fvp-single-fault:fvp-tftf-fip.tftf-aemv8a.fi-debug
Inject an unrecoverable RAS error, which gets handled in EL3.
fvp-ras-ffh,fvp-uncontainable:fvp-tftf.fault-fip.tftf-aemv8a.fi-debug
Inject uncontainable RAS errors which causes platform to panic.
fvp-ras-ffh,fvp-ras-ffh-nested:fvp-tftf-fip.tftf-ras_ffh_nested-aemv8a.fi-debug
Test nested exception handling at El3 for synchronized async EAs. Inject an SError in lower EL which remain pending until we enter EL3 through SMC call. At EL3 entry on encountering a pending async EA it will handle the async EA first (nested exception) before handling the original SMC call.
KFH with RAS extension
Couple of tests in the group :
fvp-ras-kfh,fvp-ras-kfh:fvp-tftf-fip.tftf-aemv8a.fi-debug
Inject and handle RAS errors in TF-A tests (no El3 involvement)
fvp-ras-kfh,fvp-ras-kfh-reflect:fvp-tftf-fip.tftf-ras_kfh_reflection-aemv8a.fi-debug
Reflection of synchronized errors from EL3 to TF-A tests, two tests one each for reflecting in IRQ and SMC path.
4.12.6. RAS Framework

4.12.6.1. Platform APIs
The RAS framework allows the platform to define handlers for External Abort, Uncontainable Errors, Double Fault, and errors rising from EL3 execution. Please refer to RAS Porting Guide.
4.12.6.2. Registering RAS error records
RAS nodes are components in the system capable of signalling errors to PEs through one one of the notification mechanisms—SEAs, SErrors, or interrupts. RAS nodes contain one or more error records, which are registers through which the nodes advertise various properties of the signalled error. Arm recommends that error records are implemented in the Standard Error Record format. The RAS architecture allows for error records to be accessible via system or memory-mapped registers.
The platform should enumerate the error records providing for each of them:
A handler to probe error records for errors;
When the probing identifies an error, a handler to handle it;
For memory-mapped error record, its base address and size in KB; for a system register-accessed record, the start index of the record and number of continuous records from that index;
Any node-specific auxiliary data.
With this information supplied, when the run time firmware receives one of the notification mechanisms, the RAS framework can iterate through and probe error records for error, and invoke the appropriate handler to handle it.
The RAS framework provides the macros to populate error record information. The
macros are versioned, and the latest version as of this writing is 1. These
macros create a structure of type struct err_record_info from its arguments,
which are later passed to probe and error handlers.
For memory-mapped error records:
ERR_RECORD_MEMMAP_V1(base_addr, size_num_k, probe, handler, aux)
And, for system register ones:
ERR_RECORD_SYSREG_V1(idx_start, num_idx, probe, handler, aux)
The probe handler must have the following prototype:
typedef int (*err_record_probe_t)(const struct err_record_info *info,
int *probe_data);
The probe handler must return a non-zero value if an error was detected, or 0
otherwise. The probe_data output parameter can be used to pass any useful
information resulting from probe to the error handler (see below). For
example, it could return the index of the record.
The error handler must have the following prototype:
typedef int (*err_record_handler_t)(const struct err_record_info *info,
int probe_data, const struct err_handler_data *const data);
The data constant parameter describes the various properties of the error,
including the reason for the error, exception syndrome, and also flags,
cookie, and handle parameters from the top-level exception handler.
The platform is expected populate an array using the macros above, and register
the it with the RAS framework using the macro REGISTER_ERR_RECORD_INFO(),
passing it the name of the array describing the records. Note that the macro
must be used in the same file where the array is defined.
4.12.6.2.1. Standard Error Record helpers
The TF-A RAS framework provides probe handlers for Standard Error Records, for both memory-mapped and System Register accesses:
int ras_err_ser_probe_memmap(const struct err_record_info *info,
int *probe_data);
int ras_err_ser_probe_sysreg(const struct err_record_info *info,
int *probe_data);
When the platform enumerates error records, for those records in the Standard Error Record format, these helpers maybe used instead of rolling out their own. Both helpers above:
Return non-zero value when an error is detected in a Standard Error Record;
Set
probe_datato the index of the error record upon detecting an error.
4.12.6.3. Registering RAS interrupts
RAS nodes can signal errors to the PE by raising Fault Handling and/or Error Recovery interrupts. For the firmware-first handling paradigm for interrupts to work, the platform must setup and register with EHF. See Interaction with Exception Handling Framework.
For each RAS interrupt, the platform has to provide structure of type struct
ras_interrupt:
Interrupt number;
The associated error record information (pointer to the corresponding
struct err_record_info);Optionally, a cookie.
The platform is expected to define an array of struct ras_interrupt, and
register it with the RAS framework using the macro
REGISTER_RAS_INTERRUPTS(), passing it the name of the array. Note that the
macro must be used in the same file where the array is defined.
The array of struct ras_interrupt must be sorted in the increasing order of
interrupt number. This allows for fast look of handlers in order to service RAS
interrupts.
4.12.6.4. Double-fault handling
A Double Fault condition arises when an error is signalled to the PE while handling of a previously signalled error is still underway. When a Double Fault condition arises, the Arm RAS extensions only require for handler to perform orderly shutdown of the system, as recovery may be impossible.
The RAS extensions part of Armv8.4 introduced new architectural features to deal
with Double Fault conditions, specifically, the introduction of NMEA and
EASE bits to SCR_EL3 register. These were introduced to assist EL3
software which runs part of its entry/exit routines with exceptions momentarily
masked—meaning, in such systems, External Aborts/SErrors are not immediately
handled when they occur, but only after the exceptions are unmasked again.
TF-A, for legacy reasons, executes entire EL3 with all exceptions unmasked. This means that all exceptions routed to EL3 are handled immediately. TF-A thus is able to detect a Double Fault conditions in software, without needing the intended advantages of Armv8.4 Double Fault architecture extensions.
Double faults are fatal, and terminate at the platform double fault handler, and doesn’t return.
4.12.6.5. Engaging the RAS framework
Enabling RAS support is a platform choice
The RAS support in TF-A introduces a default implementation of
plat_ea_handler, the External Abort handler in EL3. When ENABLE_FEAT_RAS
is set to 1, it’ll first call ras_ea_handler() function, which is the
top-level RAS exception handler. ras_ea_handler is responsible for iterating
to through platform-supplied error records, probe them, and when an error is
identified, look up and invoke the corresponding error handler. When
ENABLE_FEAT_RAS is set to 2 the handler will also be built but it will
not be called if FEAT_RAS is not present in hardware. The checks to do so
will incur a performance penalty.
Note that, if the platform chooses to override the plat_ea_handler function
and intend to use the RAS framework, it must explicitly call
ras_ea_handler() from within.
Similarly, for RAS interrupts, the framework defines
ras_interrupt_handler(). The RAS framework arranges for it to be invoked
when a RAS interrupt taken at EL3. The function bisects the platform-supplied
sorted array of interrupts to look up the error record information associated
with the interrupt number. That error handler for that record is then invoked to
handle the error.
4.12.6.6. Interaction with Exception Handling Framework
As mentioned in earlier sections, RAS framework interacts with the EHF to
arbitrate handling of RAS exceptions with others that are routed to EL3. This
means that the platform must partition a priority level for handling RAS exceptions. The platform must then define
the macro PLAT_RAS_PRI to the priority level used for RAS exceptions.
Platforms would typically want to allocate the highest secure priority for
RAS handling.
Handling of both interrupt and non-interrupt exceptions follow the sequences outlined in the EHF documentation. I.e., for interrupts, the priority management is implicit; but for non-interrupt exceptions, they’re explicit using EHF APIs.
Copyright (c) 2018-2026, Arm Limited and Contributors. All rights reserved.