7.3.6. Arm Development Platform Build Options
7.3.6.1. Arm Platform Build Options
ARM_BL31_IN_DRAM: Boolean option to select loading of BL31 in TZC secured DRAM. By default, BL31 is in the secure SRAM. Set this flag to 1 to load BL31 in TZC secured DRAM. If TSP is present, then setting this option also sets the TSP location to DRAM and ignores theARM_TSP_RAM_LOCATIONbuild flag.ARM_CONFIG_CNTACR: boolean option to unlock access to theCNTBase<N>frame registers by setting theCNTCTLBase.CNTACR<N>register bits. The frame number<N>is defined byPLAT_ARM_NSTIMER_FRAME_ID, which should match the frame used by the Non-Secure image (normally the Linux kernel). Default is true (access to the frame is allowed).ARM_FW_CONFIG_LOAD_ENABLE: Boolean option to enable the loading of FW_CONFIG device trees from the Firmware Image Package (FIP). When enabled, BL2 is responsible for loading, parsing, and validating the FW_CONFIG device trees from the FIP. The option depends on RESET_TO_BL2.ARM_DISABLE_TRUSTED_WDOG: boolean option to disable the Trusted Watchdog. By default, Arm platforms use a watchdog to trigger a system reset in case an error is encountered during the boot process (for example, when an image could not be loaded or authenticated). The watchdog is enabled in the early platform setup hook at BL1 and disabled in the BL1 prepare exit hook. The Trusted Watchdog may be disabled at build time for testing or development purposes.ARM_LINUX_KERNEL_AS_BL33: The Linux kernel expects registers x0-x3 to have specific values at boot. This boolean option allows the Trusted Firmware to have a Linux kernel image as BL33 by preparing the registers to these values before jumping to BL33. This option defaults to 0 (disabled). When enabled (1), the address of the Linux image must be provided via thePRELOADED_BL33_BASEoption. Additionally, either theHW_CONFIG_BASEorARM_PRELOADED_DTB_BASEoption must specify the memory location of a preloaded device tree blob (DTB). This option impliesUSE_KERNEL_DT_CONVENTION.ARM_PLAT_MT: This flag determines whether the Arm platform layer has to cater for the multi-threadingMTbit when accessing MPIDR. When this flag is set, the functions which deal with MPIDR assume that theMTbit in MPIDR is set and access the bit-fields in MPIDR accordingly. Default value of this flag is 0. Note that this option is not used on FVP platforms.ARM_PLAT_PROVIDES_BL2_MEM_PARAMS: This flag can be overriden to 1 in the Armplatform’s
platform.mkto indicate that the platform supplies its own bl2_mem_params_desc.c implementation. When enabled, the common implementation inplat/arm/common/is omitted, and the platform must add its own bl2_mem_params_desc.c file toBL2_SOURCES. The default value is 0.
ARM_RECOM_STATE_ID_ENC: The PSCI1.0 specification recommends an encoding for the construction of composite state-ID in the power-state parameter. The existing PSCI clients currently do not support this encoding of State-ID yet. Hence this flag is used to configure whether to use the recommended State-ID encoding or not. The default value of this flag is 0, in which case the platform is configured to expect NULL in the State-ID field of power-state parameter.ARM_ROTPK_LOCATION: used whenTRUSTED_BOARD_BOOT=1. It specifies the location of the ROTPK returned by the functionplat_get_rotpk_info()for Arm platforms. Depending on the selected option, the proper private key must be specified using theROT_KEYoption when building the Trusted Firmware. This private key will be used by the certificate generation tool to sign the BL2 and Trusted Key certificates. Available options forARM_ROTPK_LOCATIONare:regs: return the ROTPK hash stored in the Trusted root-key storage registers.devel_rsa: return a development public key hash embedded in the BL1 and BL2 binaries. This hash corresponds to the development private keyplat/arm/board/common/rotpk/arm_rotprivk_rsa.pem. The hashing algorithm is selected byHASH_ALG; sha256 is used ifHASH_ALGis not specified. A different RSA key can be specified by settingROT_KEY, there are 3k and 4k RSA keys inplat/arm/board/common/rotpk/.devel_ecdsa: return a development public key hash embedded in the BL1 and BL2 binaries. This hash corresponds to the development private keyplat/arm/board/common/rotpk/arm_rotprivk_ecdsa.pemunless a different key is specified withROT_KEY, such as the 384 bit key in the same directory. he hashing algorithm is selected byHASH_ALG; sha256 is used ifHASH_ALGis not specified.devel_full_dev_rsa_key: return a development public key embedded in the BL1 and BL2 binaries. This key corresponds to the RSA private keyplat/arm/board/common/rotpk/arm_rotprivk.pemby default, but can be changed by settingROT_KEY, there are 3k and 4k RSA keys inplat/arm/board/common/rotpk/.devel_full_dev_ecdsa_keyreturn a development public key embedded inthe BL1 and BL2 binaries. This key corresponds to the EC private key
plat/arm/board/common/rotpk/arm_rotprivk_ecdsa.pem, unless a different ECDSA key is specified byROT_KEY, such as the 384 bit key in the same directory.
ARM_TSP_RAM_LOCATION: location of the TSP binary. Options:tsram: Trusted SRAM (default option when TBB is not enabled)tdram: Trusted DRAM (if available)dram: Secure region in DRAM (default option when TBB is enabled, configured by the TrustZone controller)
ARM_XLAT_TABLES_LIB_V1: boolean option to compile TF-A with version 1 of the translation tables library instead of version 2. It is set to 0 by default, which selects version 2.ARM_GPT_SUPPORT: Enable GPT parser to get the entry address and length of the various partitions present in the GPT image. This support is available only for the BL2 component, and it is disabled by default. The following diagram shows the view of the FIP partition inside the GPT image: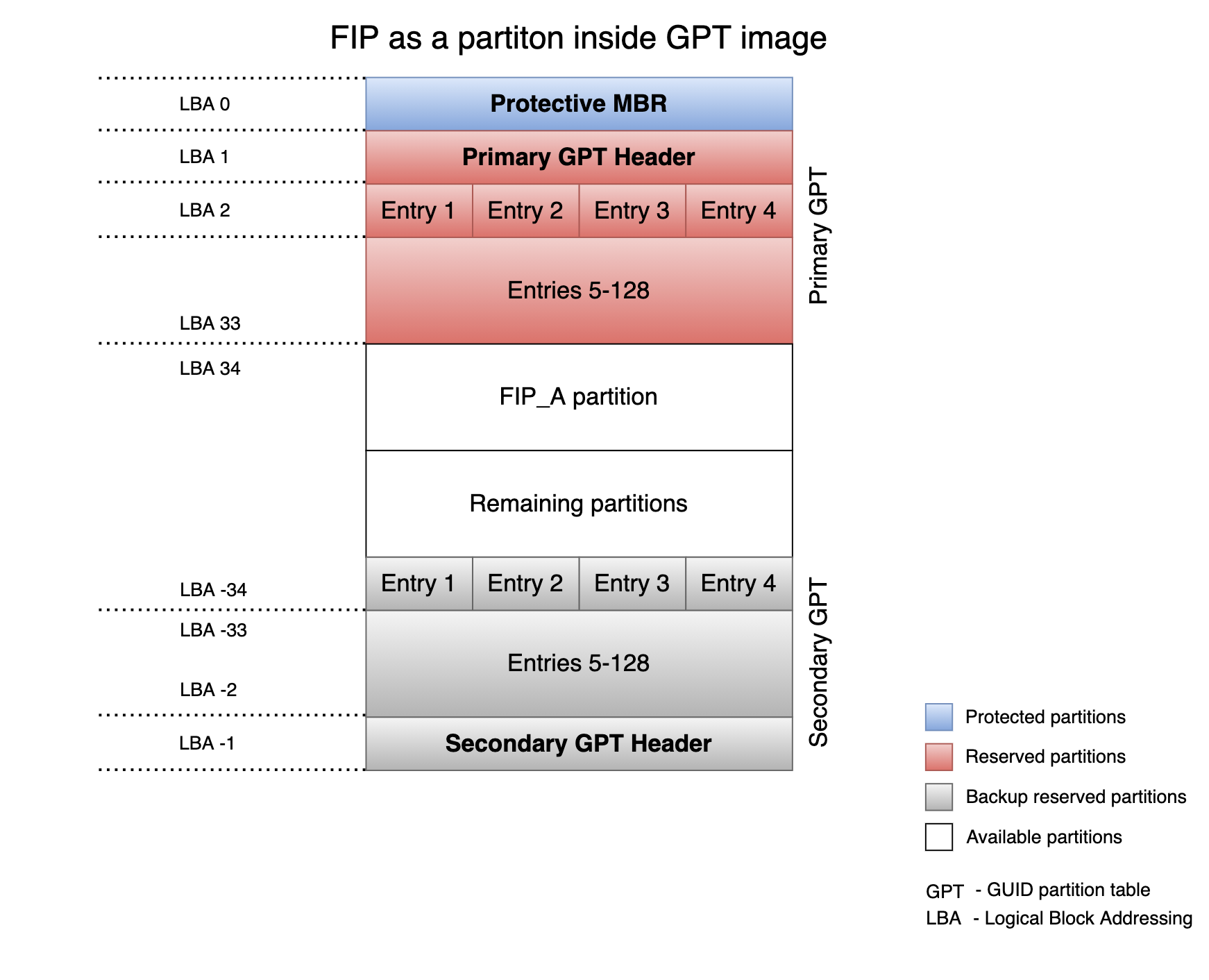
For a better understanding of these options, the Arm development platform memory map is explained in the Firmware Design.
7.3.6.2. Arm CSS Platform-Specific Build Options
CSS_DETECT_PRE_1_7_0_SCP: Boolean flag to detect SCP version incompatibility. Version 1.7.0 of the SCP firmware made a non-backwards compatible change to the MTL protocol, used for AP/SCP communication. TF-A no longer supports earlier SCP versions. If this option is set to 1 then TF-A will detect if an earlier version is in use. Default is 1.CSS_LOAD_SCP_IMAGES: Boolean flag, which when set, adds SCP_BL2 and SCP_BL2U to the FIP and FWU_FIP respectively, and enables them to be loaded during boot. Default is 1.CSS_USE_SCMI_SDS_DRIVER: Boolean flag which selects SCMI/SDS drivers instead of SCPI/BOM driver for communicating with the SCP during power management operations and for SCP RAM Firmware transfer. If this option is set to 1, then SCMI/SDS drivers will be used. Default is 0.CSS_SYSTEM_GRACEFUL_RESET: Build option to enable graceful powerdown ofCPU core on reset. This build option can be used on CSS platforms that require all the CPUs to execute the CPU specific power down sequence to complete a warm reboot sequence in which only the CPUs are power cycled.
CSS_ERRATA_SME_POWER_DOWN: Boolean option to disconnect the SME unit(PSTATE.{ZA,SM}=0) before power down and downgrade a suspend to power down request to a normal suspend request. This is necessary when software running at lower ELs requests power down without first clearing these bits. On affected cores, the CME connected to it will reject its power down request.
7.3.6.3. Arm FVP Build Options
FVP_TRUSTED_SRAM_SIZE: Size (in kilobytes) of the Trusted SRAM region to utilize when building for the FVP platform. This option defaults to 384.
7.3.6.4. Arm Juno Build Options
JUNO_AARCH32_EL3_RUNTIME: This build flag enables you to execute EL3 runtime software in AArch32 mode, which is required to run AArch32 on Juno. By default this flag is set to ‘0’. Enabling this flag builds BL1 and BL2 in AArch64 and facilitates the loading ofSP_MINand BL33 as AArch32 executable images.
7.3.6.5. Arm Neoverse RD Platform Build Options
NRD_CHIP_COUNT: Configures the number of chips on a Neoverse RD platform which supports multi-chip operation. IfNRD_CHIP_COUNTis set to any valid value greater than 1, the platform code performs required configuration to support multi-chip operation.
NRD_PLATFORM_VARIANT: Selects the variant of a Neoverse RD platform. A particular Neoverse RD platform may have multiple variants which may differ in core count, cluster count or other peripherals. This build option is used to select the appropriate platform variant for the build. The range of valid values is platform specific.
Copyright (c) 2019-2026, Arm Limited. All rights reserved.