10.7. Measured Boot Design
This document briefly explains the Measured-Boot design implementation in TF-A.
10.7.1. Introduction
Measured Boot is the process of computing and securely recording hashes of code and critical data at each stage in the boot chain before the code/data is used.
These measurements can be leveraged by other components in the system to implement a complete attestation system. For example, they could be used to enforce local attestation policies (such as releasing certain platform keys or not), or they could be securely sent to a remote challenger a.k.a. verifier after boot to attest to the state of the code and critical-data.
Measured Boot does not authenticate the code or critical-data, but simply records what code/critical-data was present on the system during boot.
It is assumed that BL1 is implicitly trusted (by virtue of immutability) and acts as the root of trust for measurement hence it is not measured.
The Measured Boot implementation in TF-A supports multiple backends to securely store measurements mentioned below in the Measured Boot Backends section.
10.7.2. Critical data
All firmware images - i.e. BLx images and their corresponding configuration files, if any - must be measured. In addition to that, there might be specific pieces of data which needs to be measured as well. These are typically different on each platform. They are referred to as critical data.
Critical data for the platform can be determined using the following criteria:
Data that influence boot flow behaviour such as -
Configuration parameters that alter the boot flow path.
Parameters that determine which firmware to load from NV-Storage to SRAM/DRAM to pass the boot process successfully.
Hardware configurations settings, debug settings and security policies that need to be in a valid state for a device to maintain its security posture during boot and runtime.
Security-sensitive data that is being updated by hardware.
Examples of Critical data:
The list of errata workarounds being applied at reset.
State of fuses such as whether an SoC is in secure mode.
NV counters that determine whether firmware is up-to-date and secure.
10.7.3. Measurement slot
The measurement slot resides in a Trusted Module and can be either a secure register or memory. The measurement slot is used to provide a method to cryptographically record (measure) images and critical data on a platform. The measurement slot update calculation, called an extend operation, is a one-way hash of all the previous measurements and the new measurement. It is the only way to change the slot value, thus no measurements can ever be removed or overwritten.
10.7.4. Measured Boot Backends
The Measured Boot implementation in TF-A supports:
Event Log
The TCG Event Log holds a record of measurements made into the Measurement Slot aka PCR (Platform Configuration Register).
The TCG EFI Protocol Specification provides details on how to measure components. The Arm document Arm® Server Base Security Guide provides specific guidance for measurements on an SBSA/SBBR server system. By considering these specifications it is decided that -
Use PCR0 for images measurements.
Use PCR1 for Critical data measurements.
TCG has specified the architecture for the structure of this log in the TCG EFI Protocol Specification. The specification describes two event log event records—the legacy, fixed size SHA1 structure called TCG_PCR_EVENT and the variable length crypto agile structure called TCG_PCR_EVENT2. Event Log driver implemented in TF-A covers later part.
Discrete TPM
A Discrete TPM (Trusted Platform Module) can be used alongside Event Log to extend measurements and validate Measured Boot functionality. The use of a Discrete TPM in TF-A to extend measurements of images and other critical data allows for an additional layer of security. The TPM can be used to attest the integrity of the Event Log.
-
It is one of the physical backends to extend the measurements. Please refer this document Runtime Security Engine (RSE) for more details.
10.7.5. Platform Interface
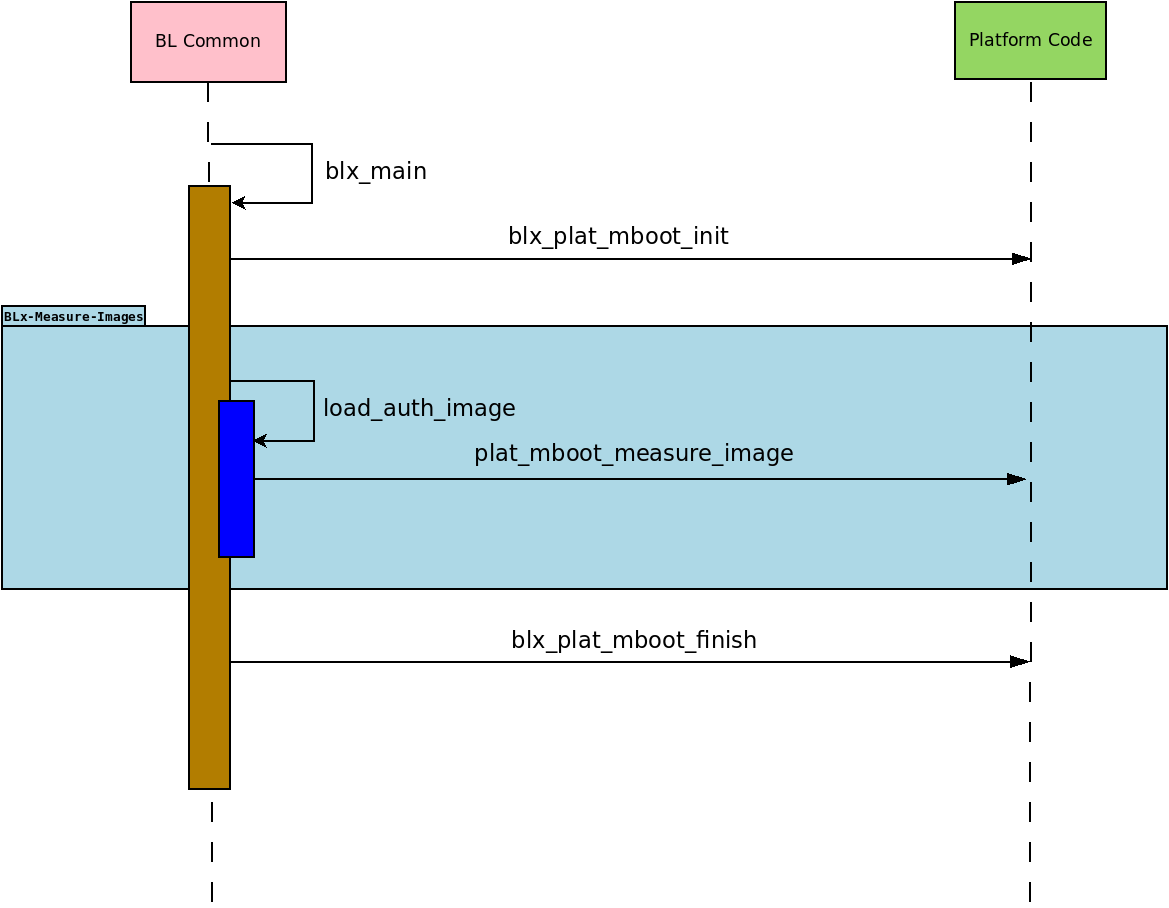
Every image which gets successfully loaded in memory (and authenticated, if trusted boot is enabled) then gets measured. In addition to that, platforms can measure any relevant piece of critical data at any point during the boot. The following diagram outlines the call sequence for Measured Boot platform interfaces invoked from generic code:
These platform interfaces are used by BL1 and BL2 only, and are declared in
include/plat/common/platform.h.
BL31 does not load and thus does not measure any image.
Responsibilities of these platform interfaces are -
Function : blx_plat_mboot_init()
void bl1_plat_mboot_init(void); void bl2_plat_mboot_init(void);
Initialise all Measured Boot backends supported by the platform (e.g. Event Log buffer, RSE). As these functions do not return any value, the platform should deal with error management, such as logging the error somewhere, or panicking the system if this is considered a fatal error.
On the Arm FVP port -
In BL1, this function is used to initialize the Event Log backend driver, and also to write header information in the Event Log buffer.
In BL2, this function is used to initialize the Event Log buffer with the information received from the BL1. It results in panic on error.
Function : plat_mboot_measure_image()
int plat_mboot_measure_image(unsigned int image_id, image_info_t *image_data);
Measure the image using a hash function of the crypto module.
Record the measurement in the corresponding backend -
If it is Event Log backend, then record the measurement in TCG Event Log format.
If it is a secure crypto-processor (like RSE), then extend the designated PCR (or store it in secure on-chip memory) with the given measurement.
This function must return 0 on success, a signed integer error code otherwise.
On the Arm FVP port, this function measures the given image and then records that measurement in the Event Log buffer. The passed id is used to retrieve information about on how to measure the image (e.g. PCR number).
Function : blx_plat_mboot_finish()
void bl1_plat_mboot_finish(void); void bl2_plat_mboot_finish(void);
Do all teardown operations with respect to initialised Measured Boot backends. This could be -
Pass the Event Log details (start address and size) to Normal world or to Secure World using any platform implementation way.
Measure all critical data if any.
As these functions do not return any value, the platform should deal with error management, such as logging the error somewhere, or panicking the system if this is considered a fatal error.
On the Arm FVP port -
In BL1, this function is used to pass the base address of the Event Log buffer and its size to BL2 via tb_fw_config to extend the Event Log buffer with the measurement of various images loaded by BL2. It results in panic on error.
In BL2, this function is used to pass the Event Log buffer information (base address and size) to non-secure(BL33) and trusted OS(BL32) via nt_fw and tos_fw config respectively. See DTB binding for Event Log properties for a description of the bindings used for Event Log properties.
Function : plat_mboot_measure_critical_data()
int plat_mboot_measure_critical_data(unsigned int critical_data_id, const void *base, size_t size);
This interface is not invoked by the generic code and it is up to the platform layer to call it where appropriate.
This function measures the given critical data structure and records its measurement using the Measured Boot backend driver. This function must return 0 on success, a signed integer error code otherwise.
In FVP, Non volatile counters get measured and recorded as Critical data using the backend via this interface.
Function : plat_mboot_measure_key()
int plat_mboot_measure_key(const void *pk_oid, const void *pk_ptr, size_t pk_len);
This function is used by the platform to measure the passed key and publicise it using any of the supported backends.
The authentication module within the trusted boot framework calls this function for every ROTPK involved in verifying the signature of a root certificate and for every subsidiary key that gets extracted from a key certificate for later authentication of a content certificate.
A cookie, passed as the first argument, serves as a key-OID pointer associated with the public key data, passed as the second argument.
Public key data size is passed as the third argument to this function.
This function must return 0 on success, a signed integer error code otherwise.
In Total Compute platform, this function is used to calculate the hash of the given key and forward this hash to RSE alongside the measurement of the image which the key signs.
Function : crypto_mod_tcg_hash()
int crypto_mod_tcg_hash(uint32_t tpm_alg_id, void *data, unsigned int len, uint8_t *digest);
Provided by the common crypto module, this helper translates TPM/TCG algorithm identifiers (
tpm_alg_id) to the crypto backend so that Event Log measurements use the same digest implementation as the platform PCR backend (software crypto, hardware accelerator or a discrete TPM).The helper hashes the
lenbytes pointed to bydatawith the algorithm requested bytpm_alg_idand writes the resulting digest todigest. The buffer is sized according to the Event Log SpecID header, so the caller only needs to fill in the bytes.This function returns 0 on success. It returns a signed errno-style error code (for example
-EOPNOTSUPPfor an unsupported algorithm or-EINVALfor invalid arguments) if hashing fails. Generic measured boot code propagates failures to the caller.Register the shim by passing
crypto_mod_tcg_hashas theevlog_hash_func_targument toevent_log_init_and_reg()(or the platform helper that wraps it) so that the common Event Log driver automatically invokes the common hashing backend whenever it needs a digest. Platforms with special hardware requirements may still provide a custom implementation if needed.
Copyright (c) 2023-2025, Arm Limited. All rights reserved.